

Welding robot multifunctional double-eye visual sensor and calibration method thereof
A welding robot and binocular vision technology, applied in welding equipment, welding accessories, instruments, etc., can solve the problems of reduced automation and intelligence of welding robots, single function, and inability to meet accuracy at the same time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and processes are provided, but the protection scope of the present invention is not limited to the following implementations example.
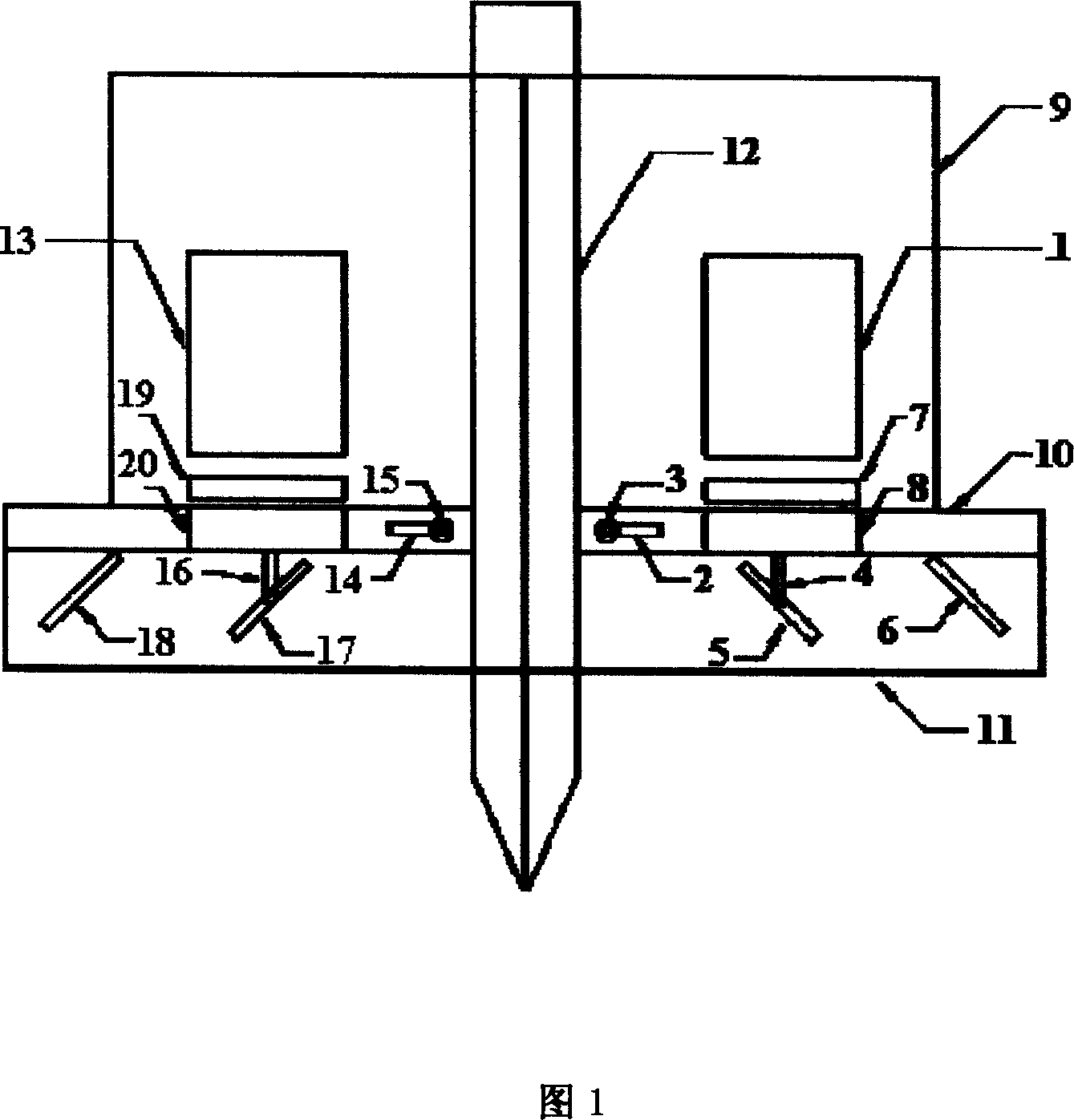
[0022] As shown in Figure 1, the multifunctional binocular vision sensor of the welding robot in this embodiment includes: the first camera 1, the second camera 13, the first and second pneumatic systems, the first and second light reduction and filter systems, the first, Two mirror systems and mounting brackets; the first camera 1, the second camera 13, the first and second pneumatic systems, the first and second light reduction and filtering systems and the first and second mirror systems are all fixed on the mounting brackets, The first camera 1, the first pneumatic system, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More