

Terminal executor of fruit and vegetable picking robot
An end-effector and picking robot technology, which is applied in picking machines, manipulators, harvesters, etc., can solve problems such as inability to be intelligent, achieve intelligent picking, meet actual conditions, and ensure the effect of fruit quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
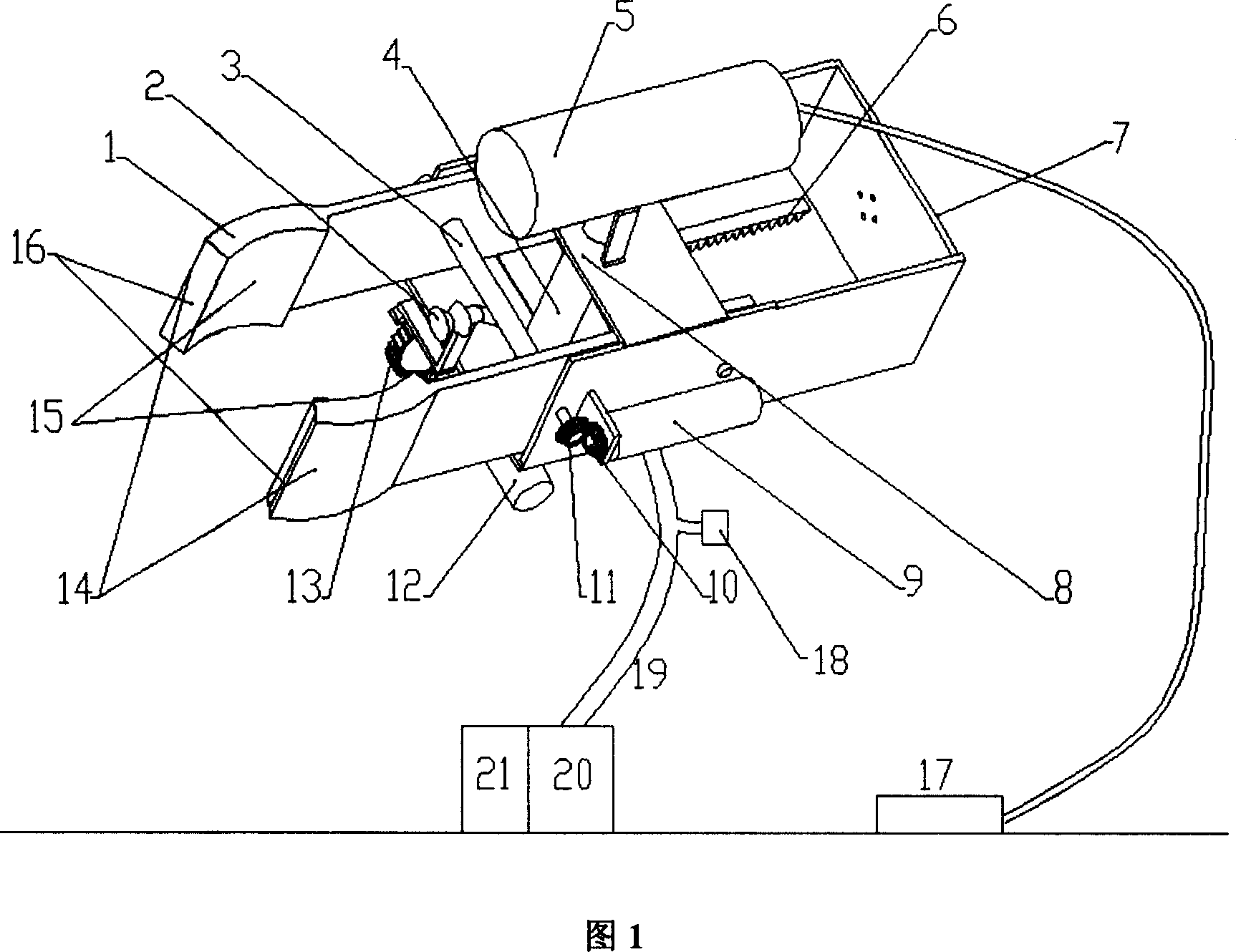
[0010] The end effector of the present invention is composed of an execution device, a perception system and a power supply system. The executive device includes a vacuum suction cup mechanism, a finger clamping mechanism and a laser cutting mechanism, which respectively complete the actions of fruit adsorption pulling, clamping and cutting. Wherein the vacuum sucker mechanism includes a small air source (21), a vacuum generator (18), a vacuum tube (18), a vacuum corrugated sucker (2), a DC servo motor (12), a gear (13) and a rack (6), the vacuum The generator (18) is connected to the small air source (21) and the vacuum corrugated suction cup (2) respectively through the hose and the vacuum tube (18), the vacuum corrugated suction cup (2) is fixed on the rack (6), and the DC servo motor (12 ) is fixed with the end effector frame, and the gear (13) is installed on the extension shaft of the DC servo motor (12). The vacuum generator (18) is provided with compressed air by a sm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More