

Method for fast and accurately compensating component periodic error in strap-down inertial guidance
A strapdown inertial navigation and compensation method technology, applied in the field of data processing, can solve the problems of increasing low-frequency components, high real-time testing frequency, and increasing the computational load of compensation processors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
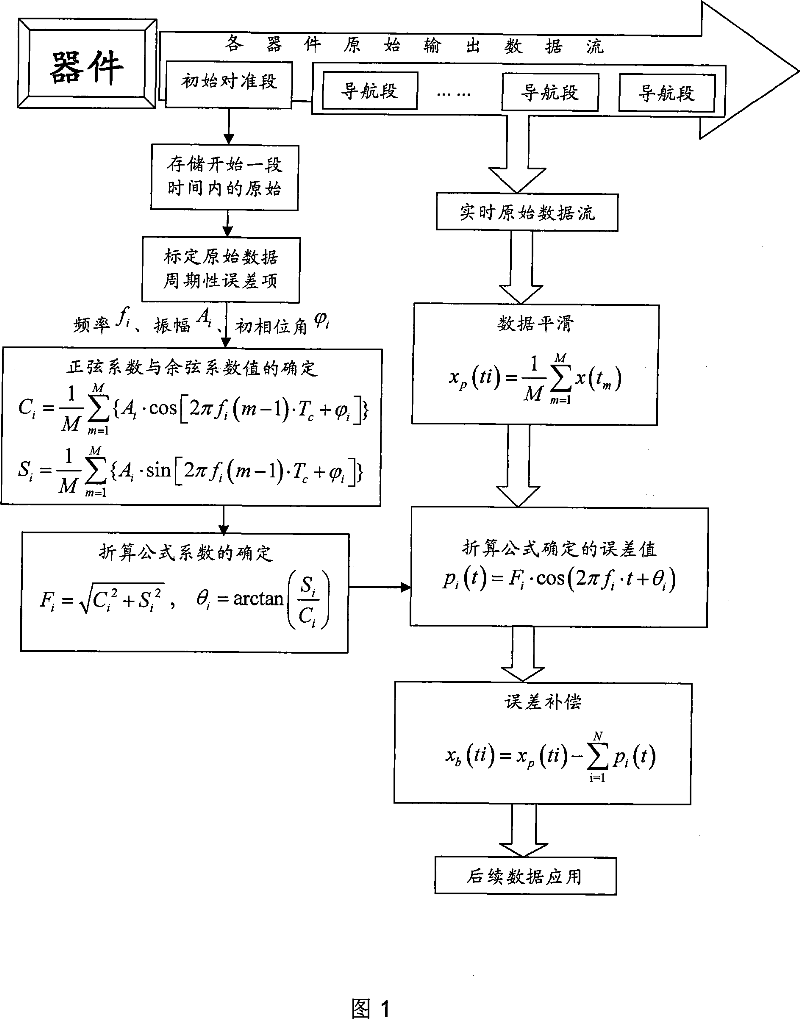
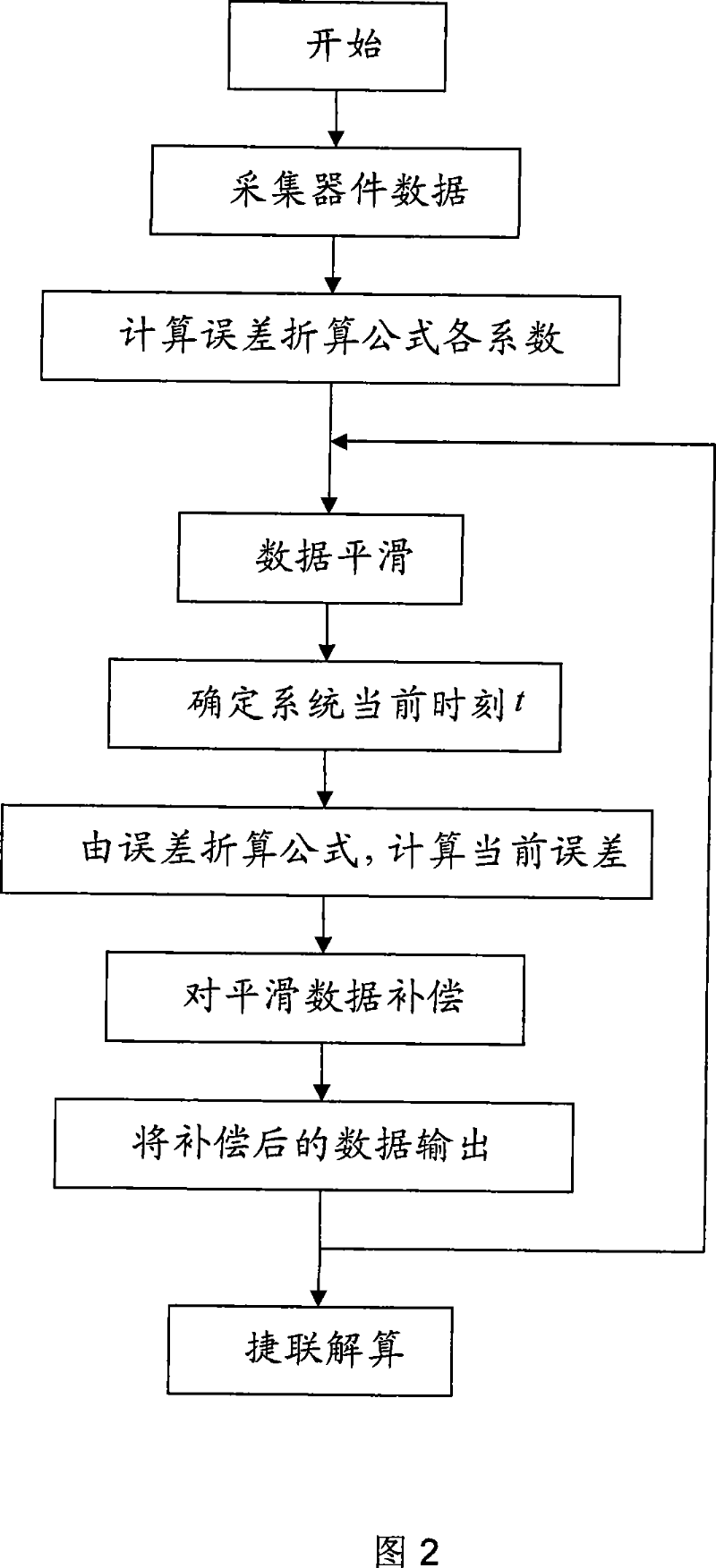
[0064] The embodiments of the present invention are without loss of generality. Taking the output data processing process of a BEI GYROCHIP LCG50 quartz MEMS gyroscope as an example, the compensation process is shown in FIG. 2 . Quartz series MEMS gyroscopes, like other gyroscopes, can continuously output angular velocity information, and their sampling frequency is relatively high. In this embodiment, the typical sampling frequency is 1000 Hz, and the inertial navigation system composed of gyroscopes involves complex navigation parameters. Therefore, the calculation frequency is relatively low, generally around 100Hz. Utilize the step that the present invention carries out real-time compensation to quartz MEMS gyroscope drift periodicity is:
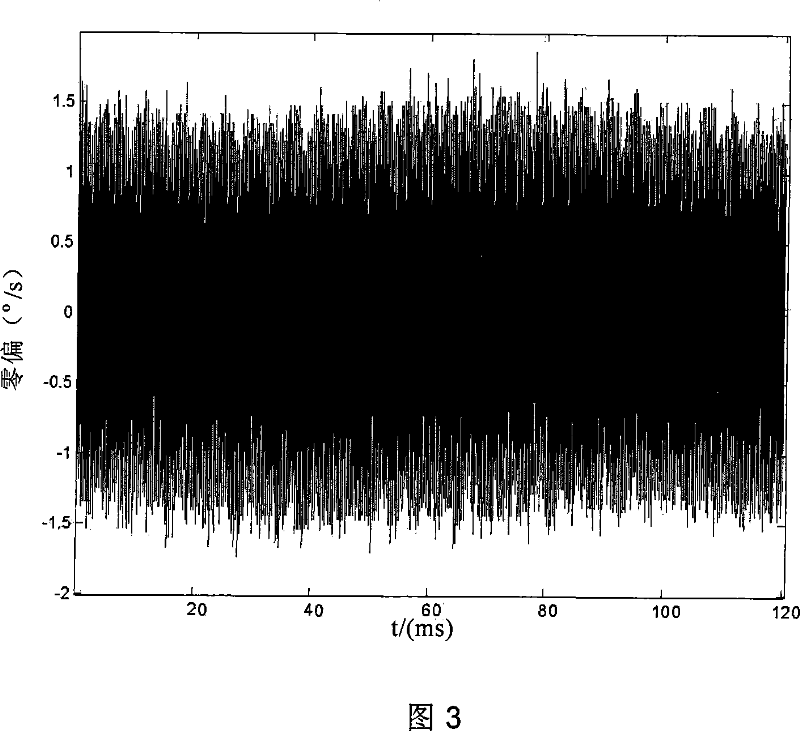
[0065] (1) This embodiment records the drift test data for 120 seconds to verify its compensation effect. Data smoothing adopts 10 data for one smoothing, then in this embodiment, the solution period T s =0.01s, sampling period T c =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More