

Mobile Robot local paths planning method on the basis of binary environmental information
A technology for local path planning and mobile robots, applied in manipulators, road network navigators, program-controlled manipulators, etc., can solve the problems of high sensor requirements, low real-time performance, and large amount of calculation, so as to improve execution efficiency and reduce hardware. Configuration requirements, the effect of short planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
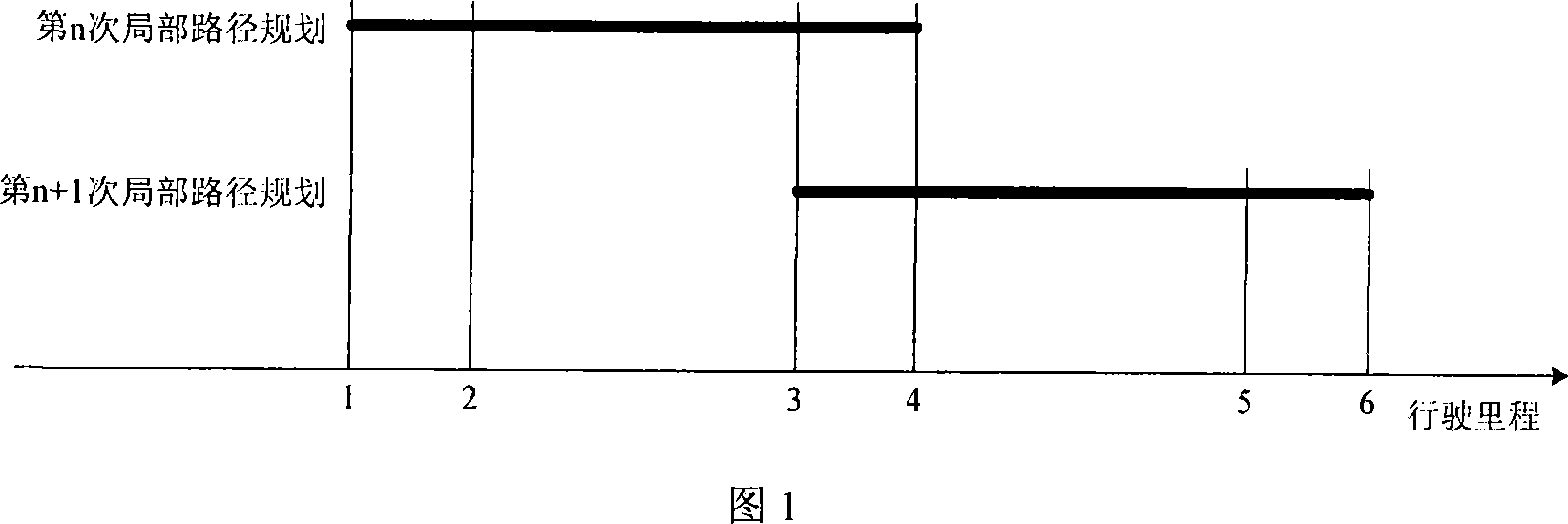
[0039] During the autonomous walking process of the mobile robot, the local path planning method needs to be executed at regular intervals, that is, the present invention generates the current local optimal path and provides it to the navigation and control system.
[0040] The execution period of the process of the local path planning method of the present invention can be divided into two modes: fixed-period execution and variable-period execution. The frequency of the local path planning process is high when the fixed cycle is executed, and the primary goal is to obtain environmental information as accurately as possible and reduce misjudgment; when the variable cycle is executed, the frequency of the local path planning process changes dynamically, and the primary goal is to successfully avoid known obstacles. Different forms can be selected according to different application objects. If the environmental information perceived by the sensor is not accurate enough (for exam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More