

Robot arm control method and control device
A manipulator and feedback control technology, applied in manipulators, manufacturing tools, etc., can solve problems such as speed reduction, impossibility to ignore interference force, etc., to reduce collision energy, improve target following characteristics, and solve deformation problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
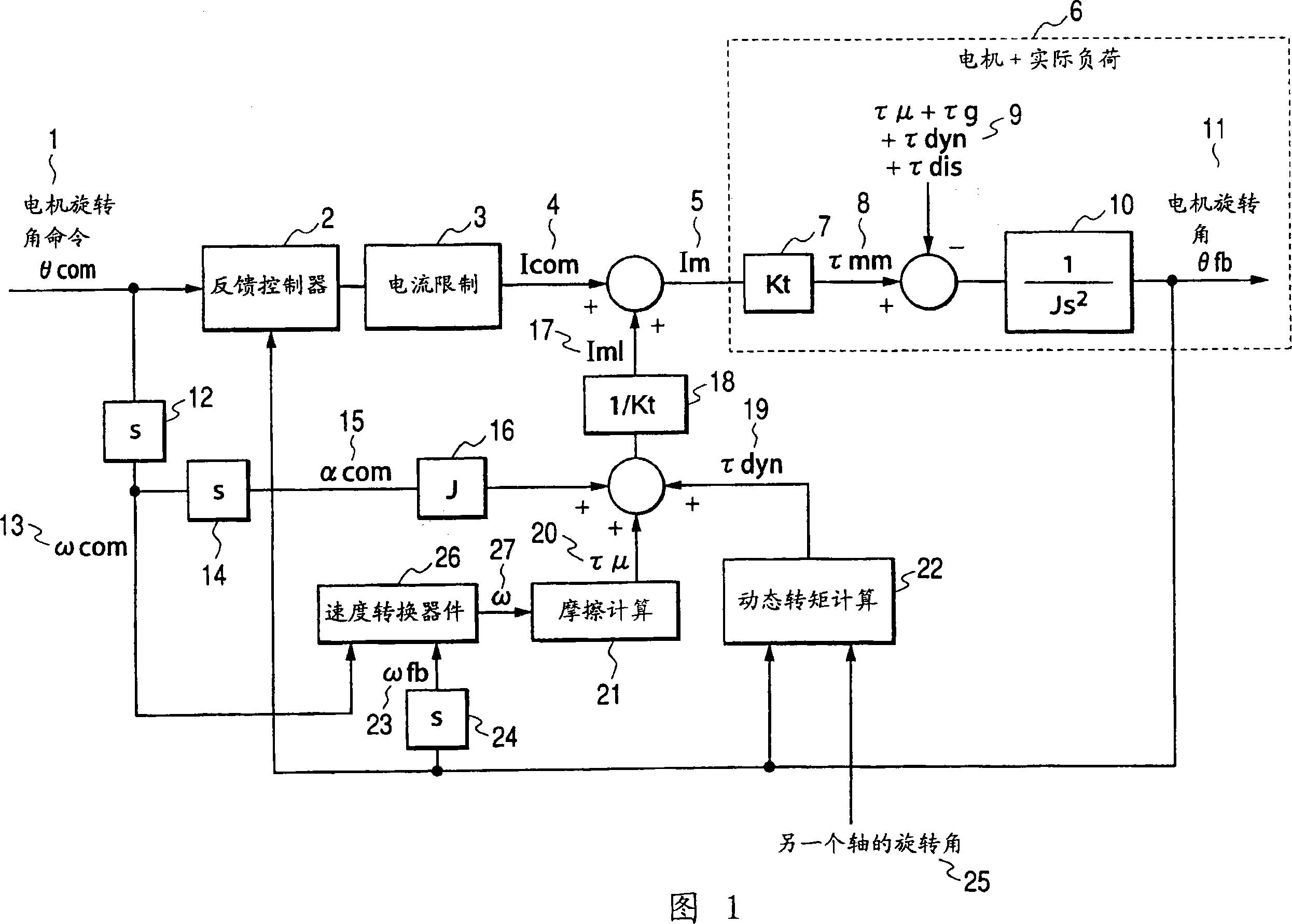
[0146] FIG. 1 is a block diagram showing a control method of the present invention. In FIG. 1, reference numeral 26 is a velocity converting device, and reference numeral 27 is an angular velocity ω selected by the velocity converting device. The feedback current command I can be obtained in the following manner com 4: command θ from the rotation angle via the feedback controller 2 com 1 and the actual motor rotation angle θ fb Perform PID calculations and perform current limit 3. Regarding the means for the current limit 3, a system in which the limit is set and a system in which the feedback gain is lowered are provided.
[0147] On the other hand, I can be calculated by expression (3) as follows ml 17. When turning the motor rotation command θ com 1 The angular acceleration α obtained when differential calculations 12 and 14 are performed twice com 15 times the motor inertia J16. Friction torque τμ20 and dynamic torque τdyn19 are added to the value thus obtained. M...
no. 2 example
[0158] In the expression (12) showing the conversion of the speed in the first embodiment, at least one of the speed command value and the actual measurement value is multiplied by a weighting coefficient.
[0159] ω = ωfb ( | kc 1 * ωcom + kc 2 | ≤ | ωfb | ) ωcom ( | kc 1 * ωcom +...
no. 3 example
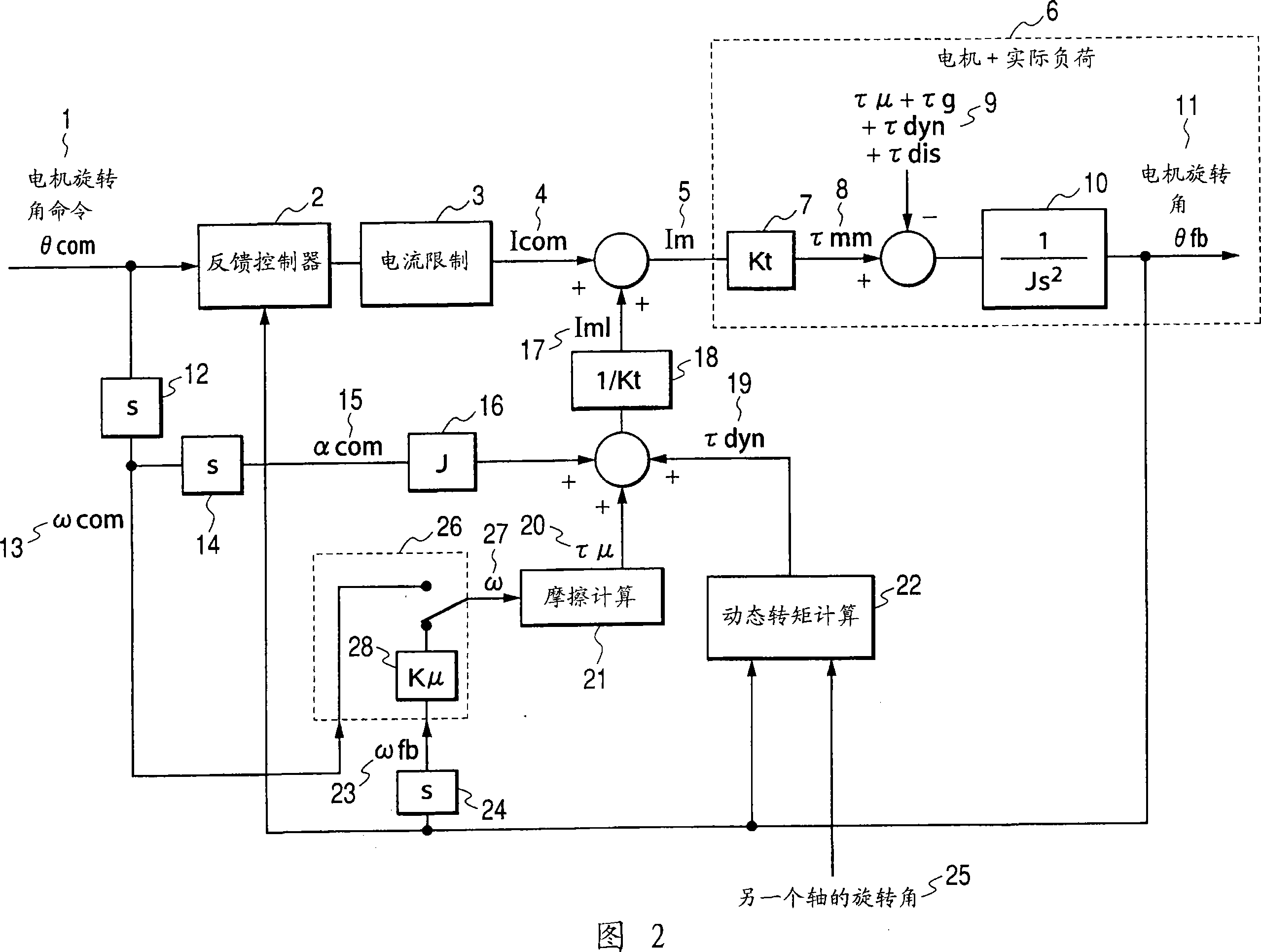
[0164] Fig. 2 is a block diagram showing a control method of the third embodiment.
[0165] The actual angular velocity ω that is input to the velocity conversion device 26 fb 23 multiplied by the friction compensation rate kμ.
[0166] It is expressed by Expression (15) as follows.
[0167] ω = k μ * ωfb ( | kcl * ωcom + kc 2 | ≤ | ωfb | ) ωcom ( | ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More