

Cartesian coordinate type fruit picking mechanical arm device
A technology of rectangular coordinates and manipulators, which is applied to picking machines, agricultural machinery and tools, harvesters, etc., can solve the problems of low versatility and difficult control, and achieve the effect of broad market prospects, low cost and good mechanical versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
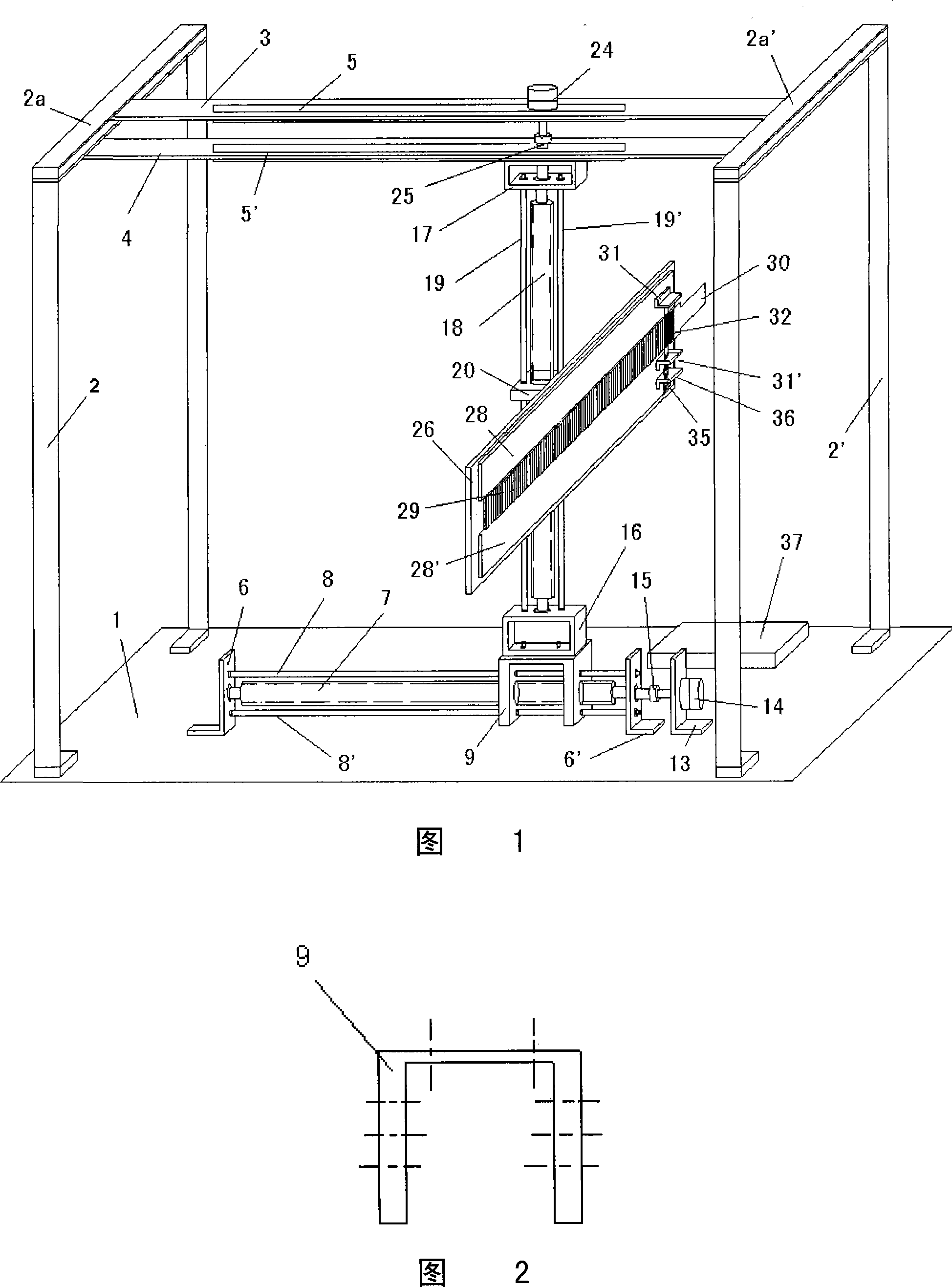
[0024] As shown in Figure 1, the present invention includes a working support, a horizontal movement mechanism, a vertical movement mechanism and a depth movement mechanism.
[0025] The working support includes a flat workbench 1, a group of "II" type supports 2, 2' are fixed on both sides of the workbench 1, and a belt There is a motor support bar 3 with a reducer, and a vertical lead screw support bar 4 corresponding to the motor support bar 3 is arranged on the bottom surface of the middle part of the beams 2a, 2a' of the two sets of brackets 2, 2'. The middle part of the motor support bar 3 and the vertical lead screw support bar 4 is respectively provided with a long-hole-shaped horizontal slideway 5, 5'.
[0026] The horizontal movement mechanism includes two fixed plates 6, 6' arranged on the workbench 1 arranged inside the two groups of brac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More