

A step wheel combined mobile robot
A mobile robot and composite technology, applied in the field of robotics, can solve the problems of composite mechanism structure and control complexity, maneuverability barriers, reliability reduction, and easy failure, etc., to overcome the stability boundary limit, compact structure, and strong obstacle surmounting effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be described in more detail below with reference to the drawings and embodiments.
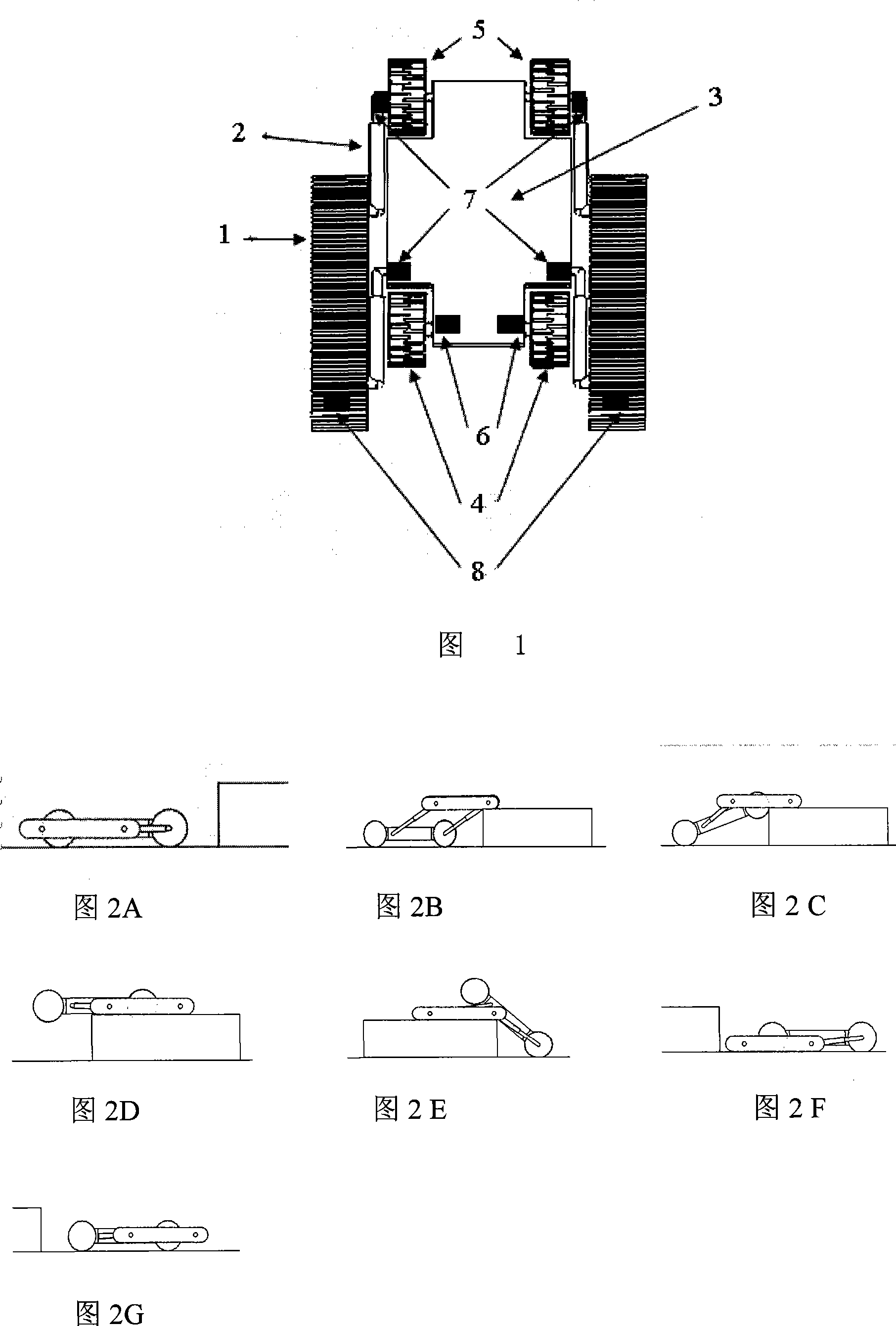
[0034] As shown in Figure 1, in the technical scheme of the present invention, the wheel-track compound type mobile robot of design takes wheeled mobile robot as carrier, on the center of front and rear wheel 5,4 and car body 3, through telescopic rod 2 and Track flank 1 connection. And ensure that the height of the track flank 1 from the horizontal plane is less than the diameter of the wheel. When the crawler wing 1 is in the air, the center of gravity of the system can be adjusted by adjusting the length and rotation angle of the telescopic rod 2 . Power and other instruments and equipment are housed on the car body 3 in addition. All the power of the mobile robot of the present invention adopts a DC servo motor, which is output through a reducer. Wheeled movement requires high speed and flexibility, so a reducer with a small red...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More