

Robot smart arm joint drive and reduction device thereof
A reduction gear, robot technology, applied in transmission, gear transmission, manipulator and other directions, can solve the problems of limiting the design effect and function of dexterous arm, low mechanical efficiency of worm gear reducer, limited output torque of planetary reducer, etc. Great implementation value, compact structure, simple control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
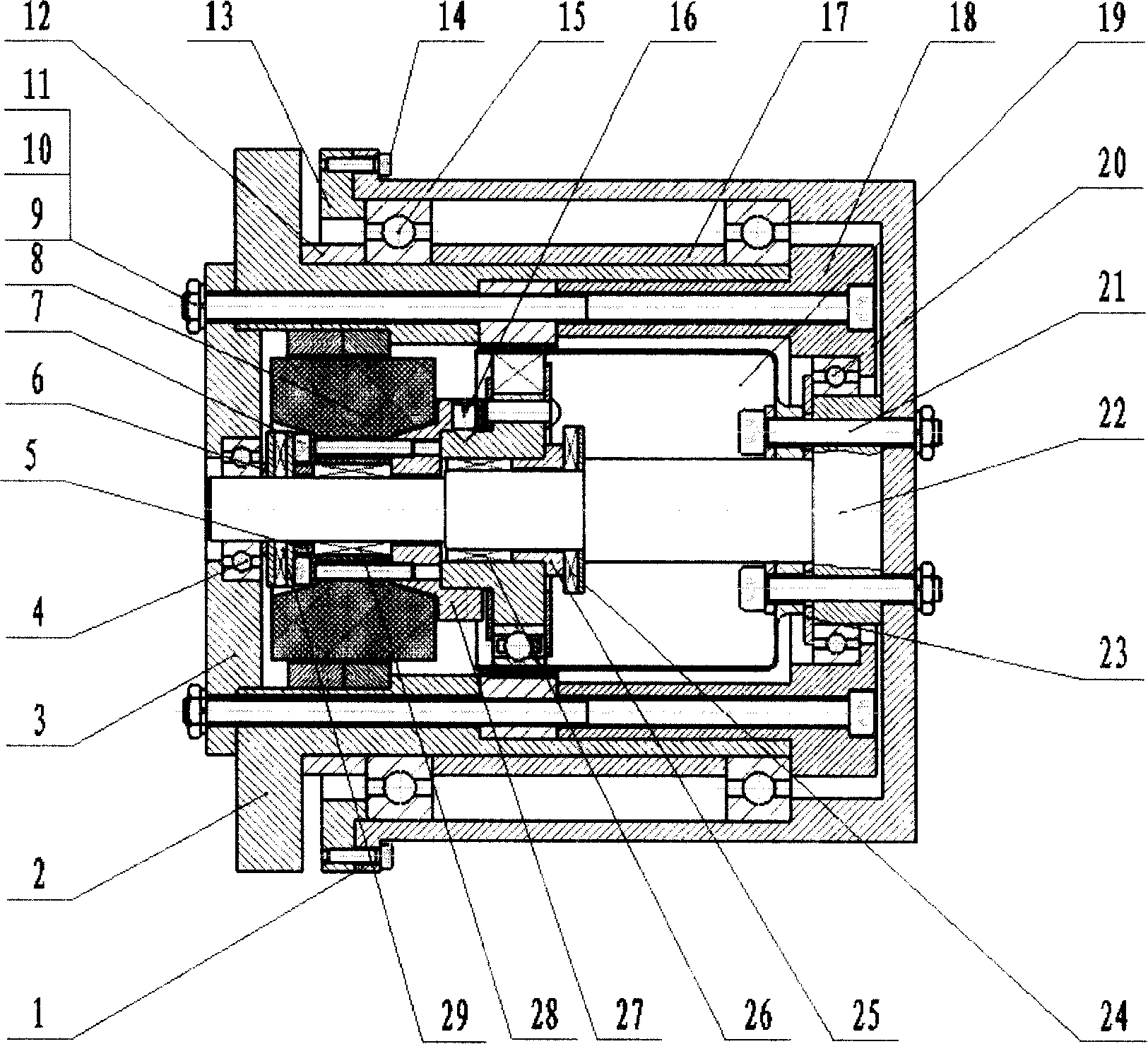
[0008] figure 1 is an embodiment of the present invention. Such as figure 1 Shown, the embodiment of the present invention is: robot dexterous arm joint drive and deceleration device thereof, by flange (1), the first motor fixing frame (2), end cover (3), deep groove ball bearing (4) ( 15)(20), washer(6), hexagon socket cap screw(7)(9)(14)(21), permanent magnet DC torque motor(8), hexagon thin nut(10), spring washer(11 ), the first sleeve (12), the bearing cover (13), the tightening screw (16), the second sleeve (17), the second motor fixing frame (18), the harmonic reducer (19), the Shaft (22), retaining ring (23), needle roller bearing (24) (28), thrust needle roller bearing (26) (29), connecting flange (27) is formed. The stator of the permanent magnet DC torque motor (8) is pasted and fixed on the first motor fixing frame (2) by an adhesive, the rotor of the motor is connected with the connection flange (27) by screws, and the connection flange (27) is connected by fast...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More