

Frame type decoupling six component sensor and use method
A six-component sensor and frame-type technology, which is applied in the direction of instruments, measuring force, and measuring devices, can solve the problems of complex structure, low sensitivity, and small rigidity of the sensor, and achieve the effects of cost reduction, good symmetry, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with accompanying drawing
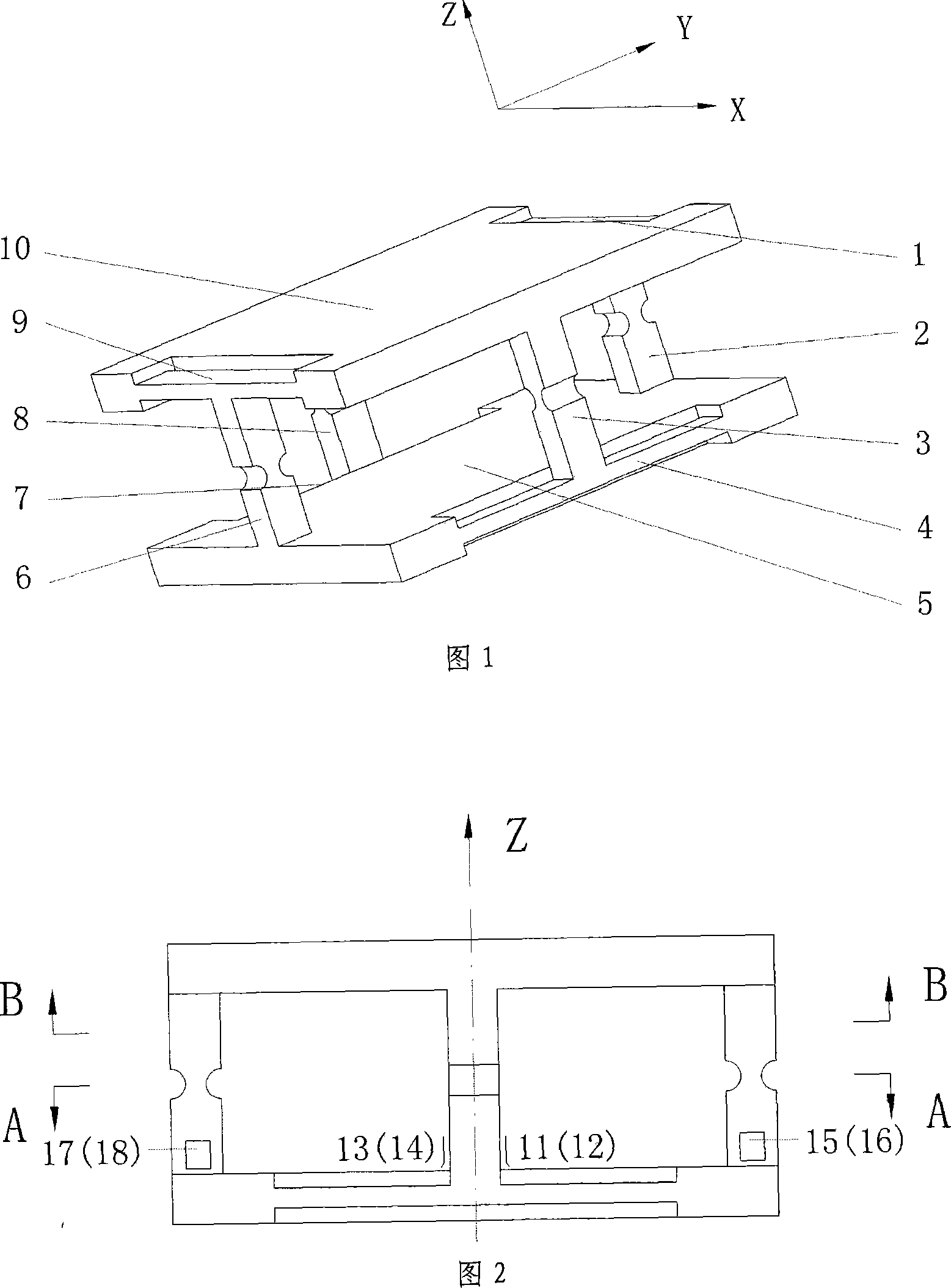
[0025] Fig. 1 is the overall structure schematic diagram of the present invention, and this sensor is provided with the longitudinal beam 2,3,6,8 of uniaxial flexible hinge by floating platform 10, fixed platform 5, four, and four transverse beams 1,4,7 , 9, wherein the longitudinal beams 2, 6 and the transverse beams 1, 9 on the floating platform 10 form a pair of T-shaped beams, and the longitudinal beams 3, 8 and the transverse beams 4, 7 on the fixed platform 5 form a pair of inverted T-shaped beams. Beams, T-beams and inverted T-beams connect the floating platform 10 and the fixed platform 5 as a whole.
[0026] During the operation of the sensor, when subjected to an X-component external force, the longitudinal beams 2 and 6 are much stiffer than the longitudinal beams 3 and 8, and when subjected to a Y-component external force, the longitudinal beams 3 and 8...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More