Network control method based on CAN bus
A CAN bus and CAN controller technology, applied in the field of embedded real-time control systems, can solve the problems of inconvenience, ununiform monitoring and management, limited network management methods, etc., to achieve the effect of improving stability and flexible use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The state management-based CAN network control method of the present invention will be further described below in conjunction with the accompanying drawings and examples.
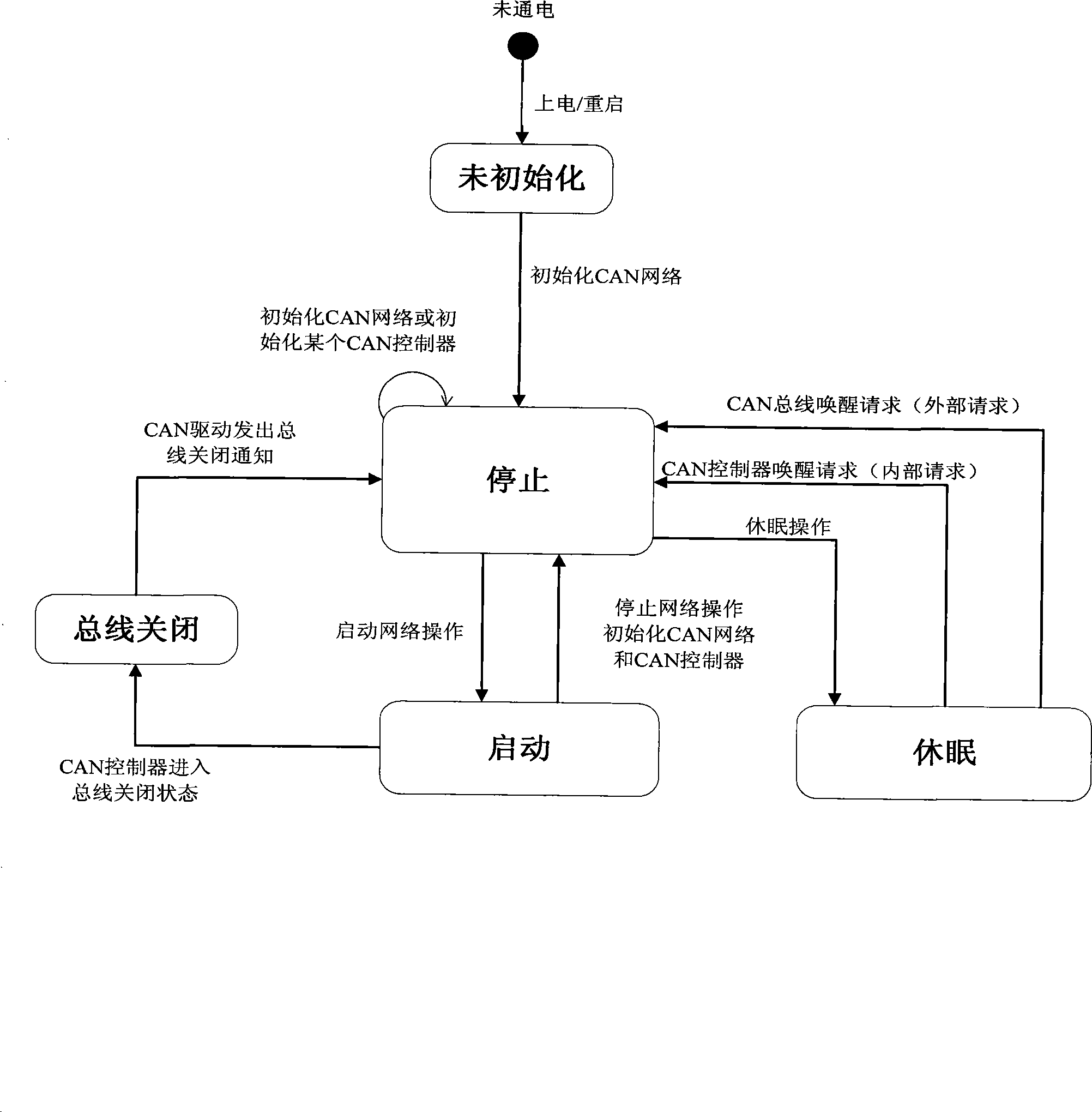
[0020] Described below are the five states or modes of operation in a CAN bus network and typical conditions or instances of transitions to these modes:
[0021] 1. Uninitialized state
[0022] After the system is powered on, the entire network and each CAN controller on the network is in an uninitialized state, which is the initial state of the entire system.
[0023] 2. Stop state
[0024] There are four main situations that will bring the network and each CAN controller on the network to a halt:
[0025] a) Initialization operation
[0026] Event: CAN interface layer initializes CAN network
[0027] Behavior: The CAN driver layer calls the corresponding function to initialize each CAN controller on the network
[0028] b) Stop network operations
[0029] Event: CAN interface layer stops CAN ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com