

Aiming method for robot bird
A robot bird and computer technology, applied in the control field of the control system, can solve the problems such as the large physiological difference between birds and mammals, the limitation of the practical application of robot animals, the dependence of control and navigation effects on training, etc., so as to achieve strong guidance function and fast movement. The effect of speed, large application advantages
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
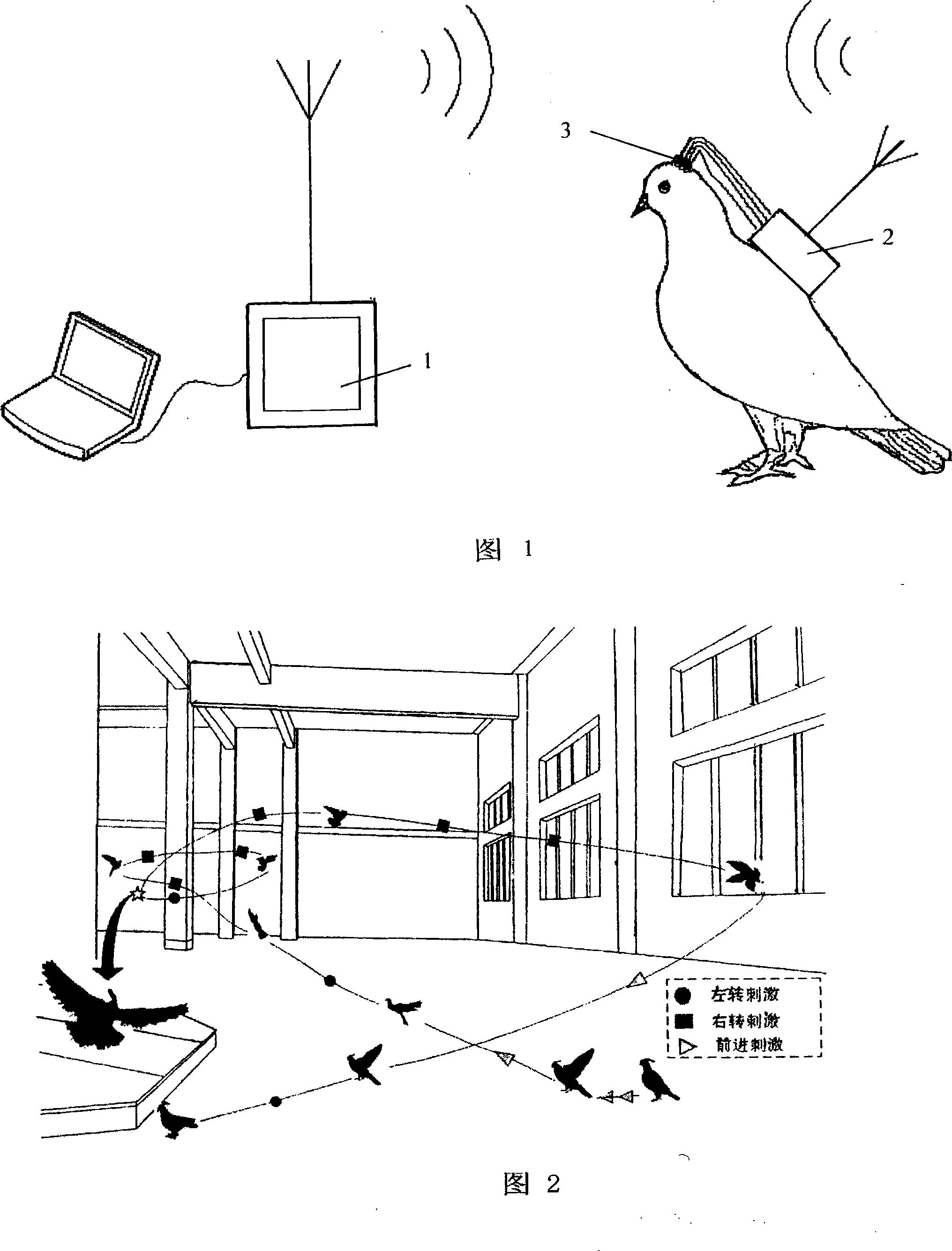
[0032]Select domestic pigeon as robot bird, install a micro-stimulation signal generator 2 with microprocessor, remote control on domestic pigeon head or back. According to the remote control command, the micro-stimulation generator 2 can generate coded micro-stimulation electrical signals and apply them to the corresponding DIVA or ancient striatum via the micro-electrodes 3 . The coded microstimulation electrical signal is a biphasic pulse sequence, and the parameter range of the pulse is: each pulse sequence (pulse train) is 5, 6, 7, 8, 9, 10, 11, 12, 13, 14 or 15 biphasic Phase pulse, the pulse amplitude is 70, 75, 80, 85 or 90 microamperes, the pulse width of each single phase is 0.2, 0.3, 0.4 or 0.5ms, and the pulse frequency is 50, 60, 70, 80, 90, 100, 110, 120, 130, 140 or 150Hz; when the frequency increases, the pulse width should be appropriately narrowed accordingly. The parameters of the above-mentioned pulses are transmitted to the micro-stimulation generator 2 b...
Embodiment 2
[0035] Embodiment two: indoor flight guidance. In a sufficiently spacious room, we used a micro-stimulation signal with an amplitude of 80 microamperes to guide domestic pigeons to fly, in order to test the feasibility and applicability of the "robot bird (pigeon)" within the range of sight.
[0036] First force the pigeons to take off. For standing domestic pigeons, no matter whether the archastriatum is stimulated on one side (left / right side) or both sides simultaneously, the domestic pigeon will definitely take off; but for standing domestic pigeons, stimulate the left / right side DIVA respectively , it can also take off in the left / right direction in most cases. Relatively speaking, it is more reliable to stimulate the ancient striatum to force the pigeons to take off, so the stimulation of the ancient striatum is the main method to force the pigeons to take off.
[0037] Then guide the domestic pigeons in flight. During the flight of domestic pigeons, if the ancient st...
Embodiment 3
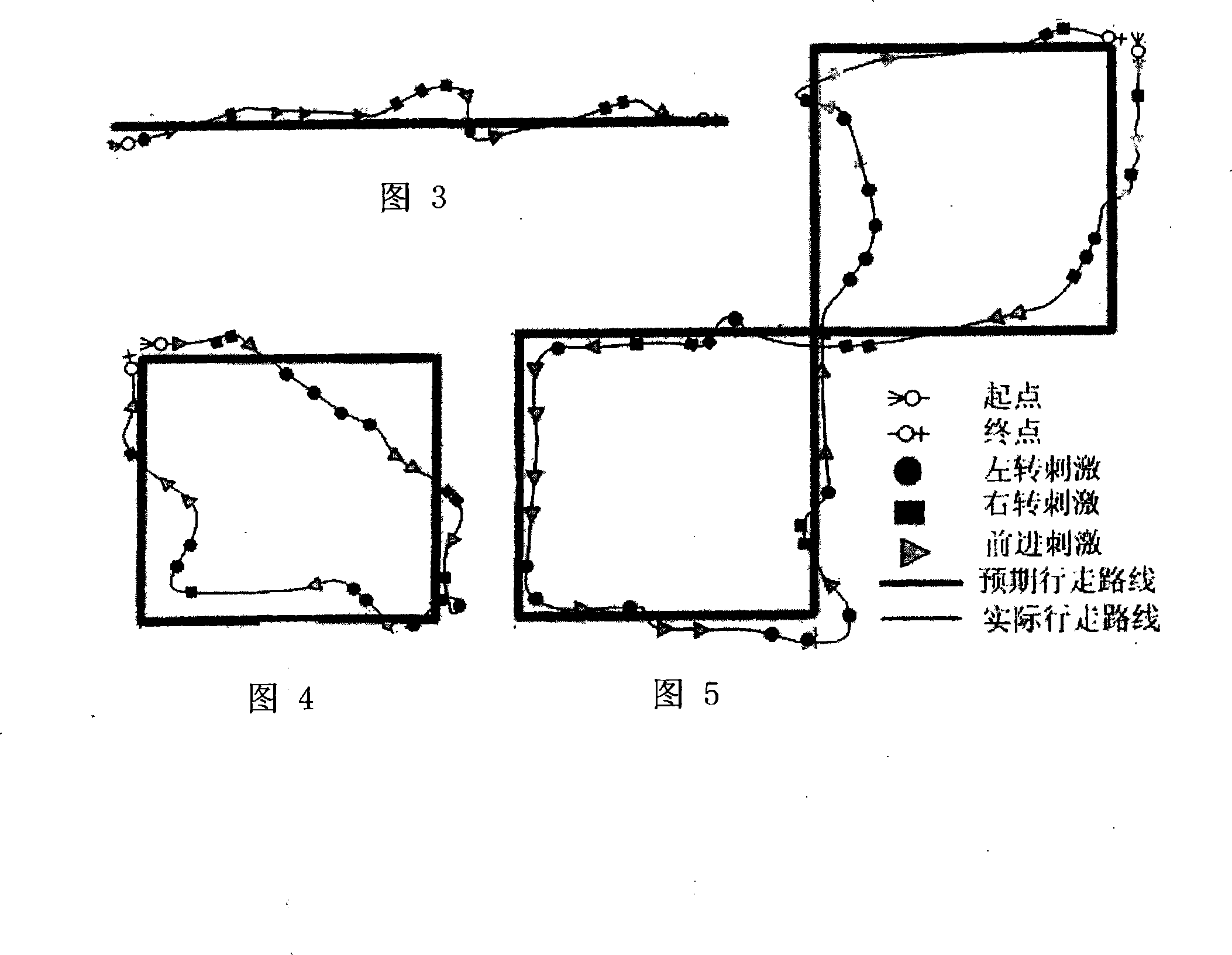
[0039] Embodiment three: "walking" guidance of robot bird on the ground. In view of the high speed of domestic pigeons in flight, it is difficult to see clearly the guiding effect of the micro-stimulation signal. In order to fully demonstrate and clearly observe the instantaneous behavior of domestic pigeons under the action of micro-stimulation signals, the effect of guiding the behavior of domestic pigeons is further verified. Part of the large feathers of the domestic pigeon's wings were bundled so that it could not fly but could only walk on the ground, and then the domestic pigeon was controlled and navigated along the expected route (6cm wide red tape Stick it on the ground as a set path) to reach the intended destination. The reason for reducing the current amplitude here is that the response of domestic pigeons to micro-electric stimulation is closely related to the current amplitude. When the current is small, domestic pigeons can still escape by walking; when the cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More