

Dual-purpose robot leg with wheel and foot
A robot and dual-purpose technology, applied in the field of robots, can solve problems such as complex lines, and achieve the effect of saving drive modules, compact structure, ensuring moving speed and terrain adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Further illustrate the present invention below in conjunction with accompanying drawing.
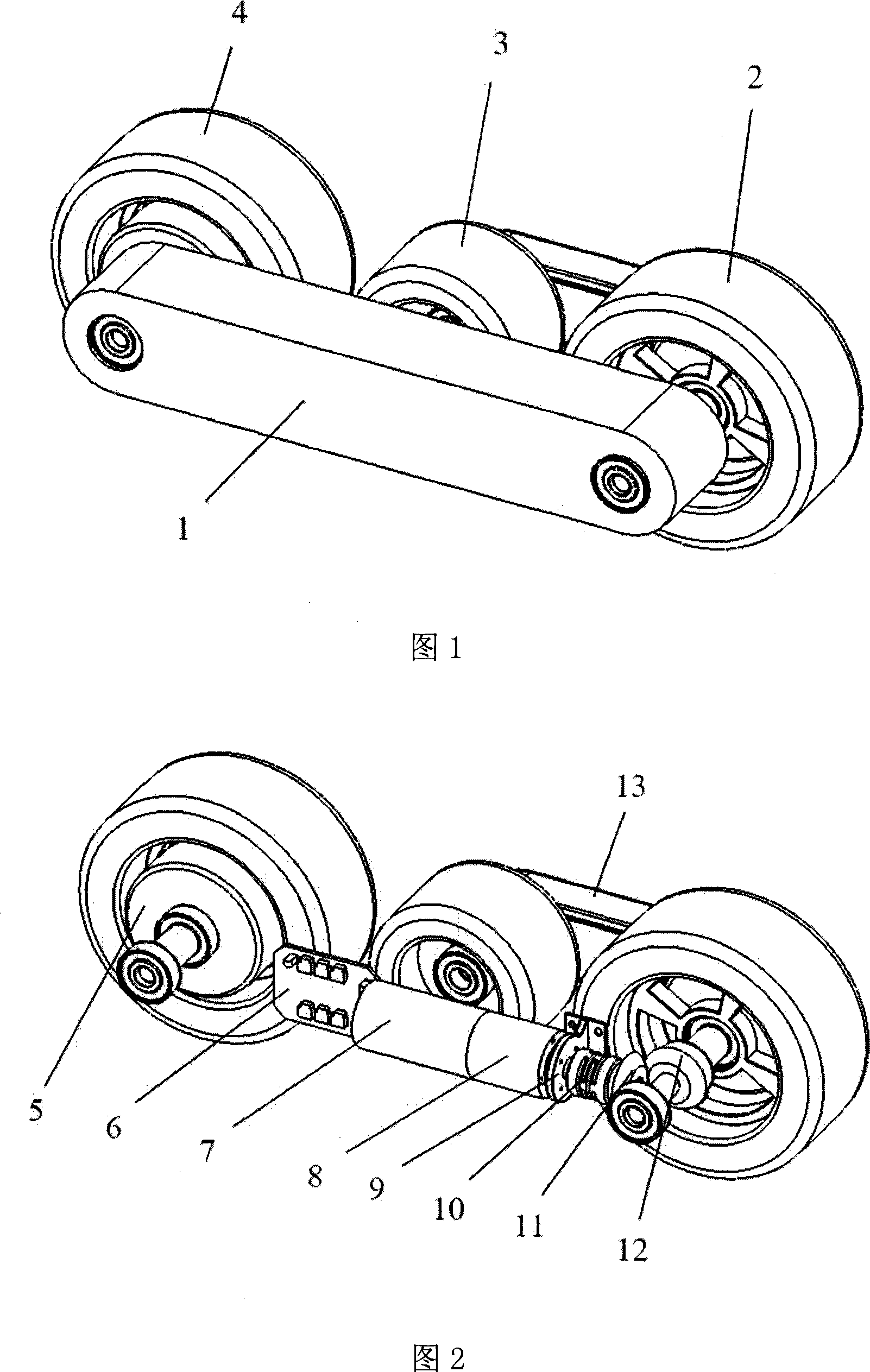
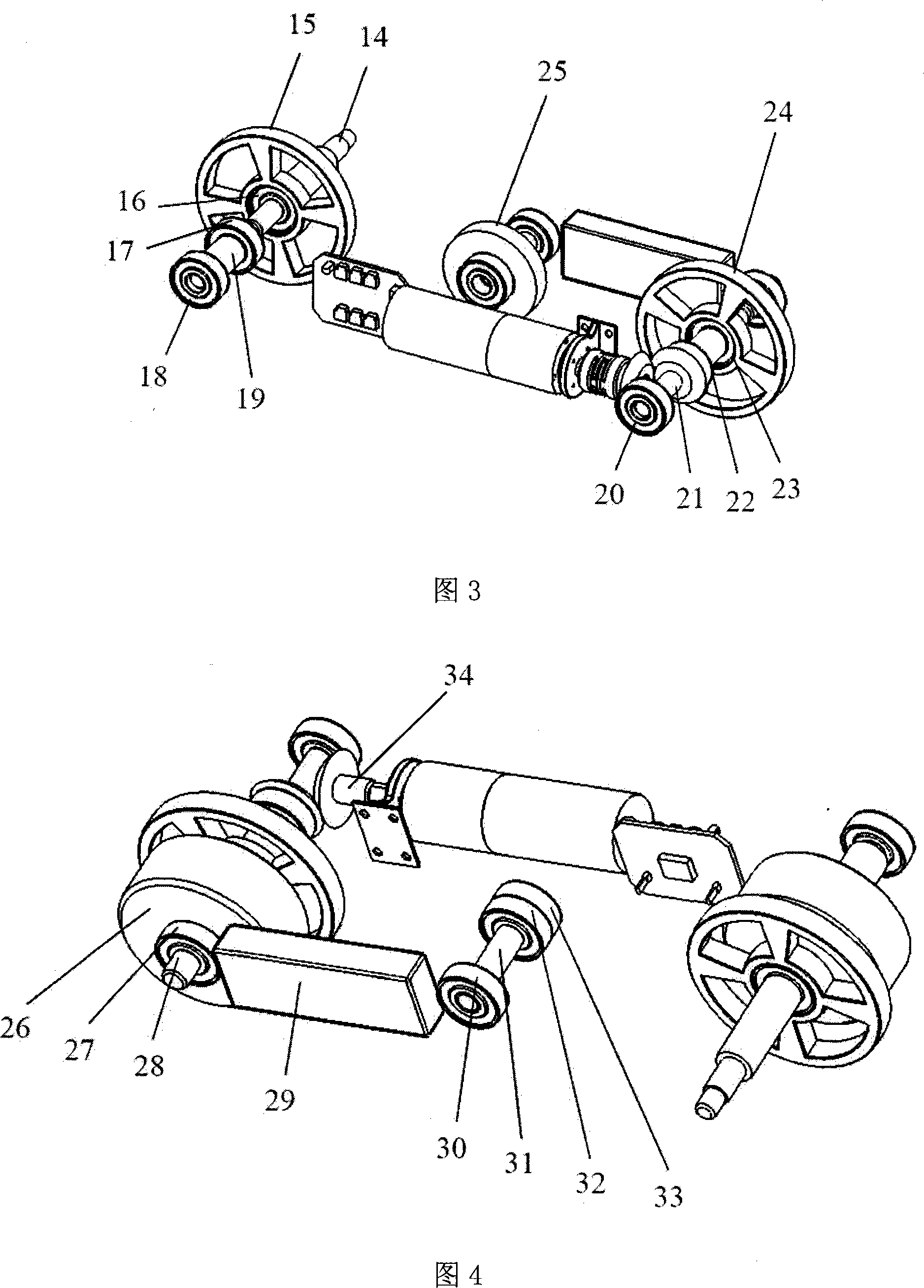
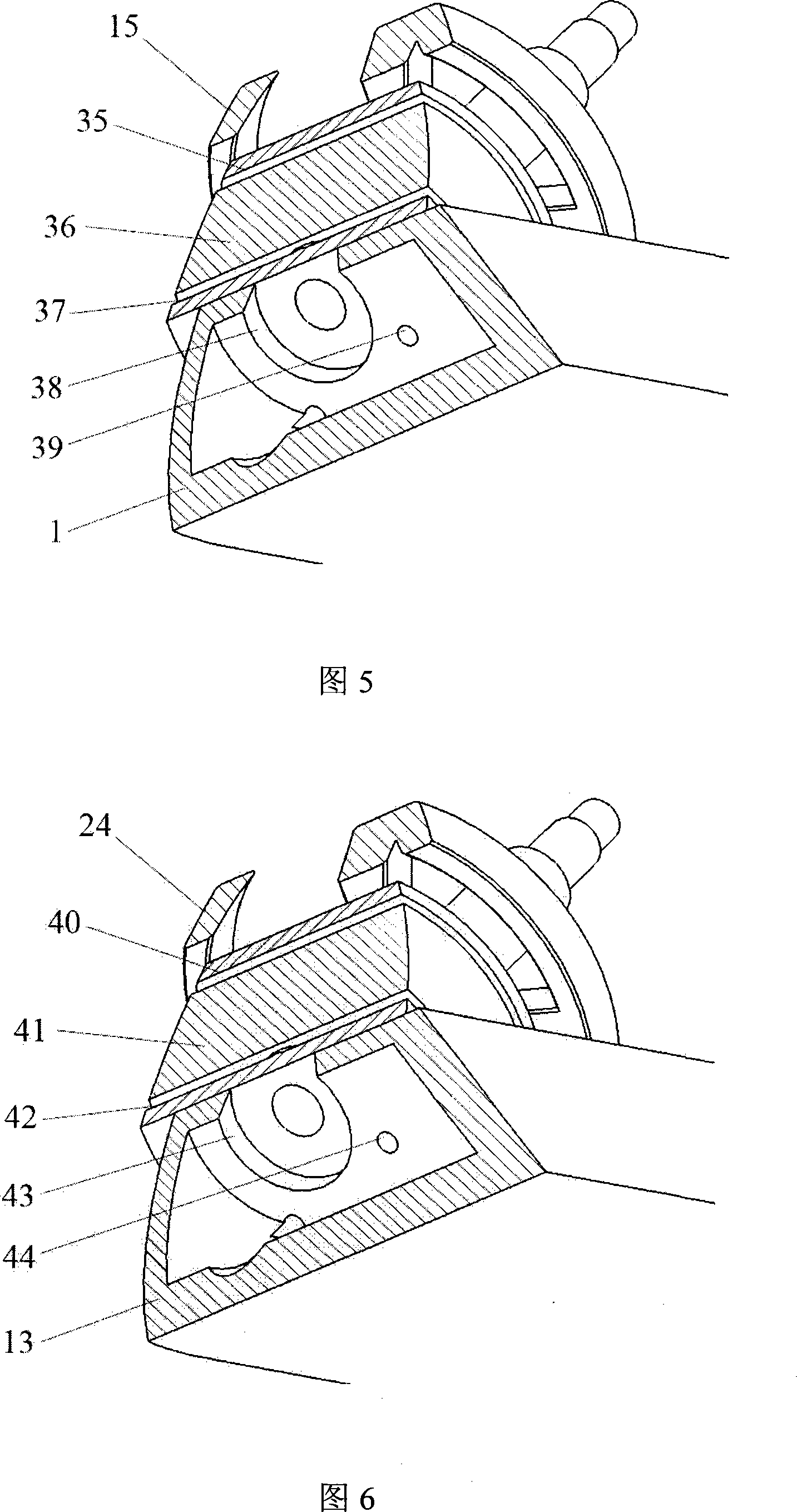
[0023] The wheel-foot robot leg module adopts two power input units, and the wheel-foot mode is switched through the clutch. The first large hub 15 and the second large hub 24 can complete active or passive rotation around the first axis 14 and the third axis 21 respectively. , the long connecting rod 1 can swing back and forth around the second axis 19 , the short connecting rod 13 can complete the rotational movement around the fourth axis 28 , and the small hub 25 can complete the passive rotational movement around the fifth axis 31 . The movement of the wheels and legs is planned and controlled by a unified controller, and an independent power supply is adopted.
[0024] As shown in Fig. 1, Fig. 2, Fig. 3, Fig. 4, Fig. 5, and Fig. 6, the wheel-footed robot leg module includes a first large wheel 15, a second large wheel 24, a long connecting rod 1, a short connecting rod 13, ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Gap | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More