

Optic fiber gyroscope strapdown inertial navigation system two-position initial alignment method based on filtering
A fiber optic gyroscope and initial alignment technology, which is applied to measurement devices, navigation through velocity/acceleration measurement, instruments, etc., can solve the problems of unobservable drift of fiber optic gyroscope, difficulty in improving the observability of azimuth misalignment angle, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
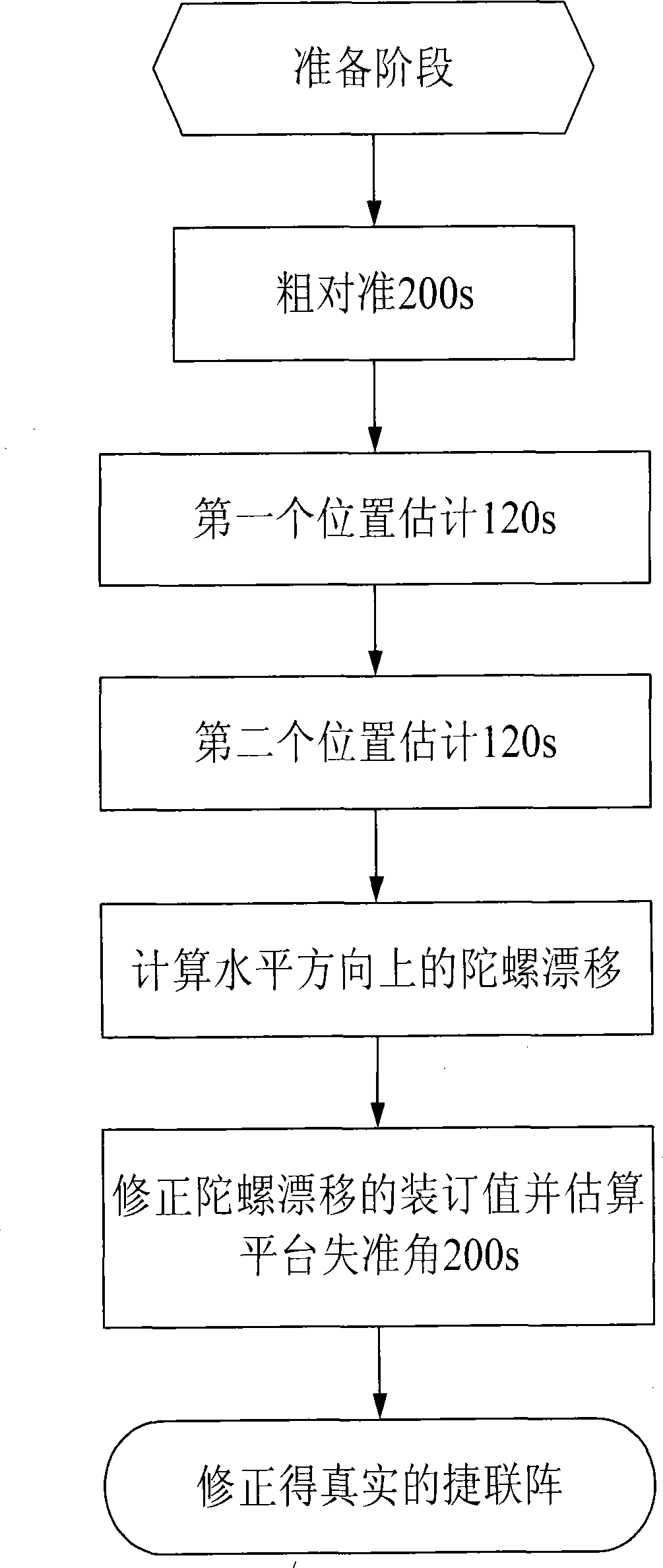
[0064] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0065] Step 1. Determine the initial position parameters (including initial longitude and latitude) of the carrier through the external device, and staple them into the navigation computer.
[0066] Step 2. The fiber optic gyroscope strapdown inertial navigation system is preheated, and then the data output by the fiber optic gyroscope and the quartz accelerometer are collected. The warm-up time is set according to the specific system.
[0067] Step 3. Process the collected data from the fiber optic gyroscope and quartz accelerometer. According to the error propagation characteristics and classical control theory of the fiber optic gyroscope strapdown inertial navigation system, use the second-order leveling method and the orientation estimation method to complete the system. Coarse alignment, initially determine the pose of the carrier. The coarse alignment tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More