Electric-drive creeping type cable robot
A robot and electric drive technology, applied in the field of robots, can solve problems such as the inability to meet the large load of cables, slow speed, and heavy weight of the trolley, and achieve the effects of being conducive to self-contained energy, easy to manufacture, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
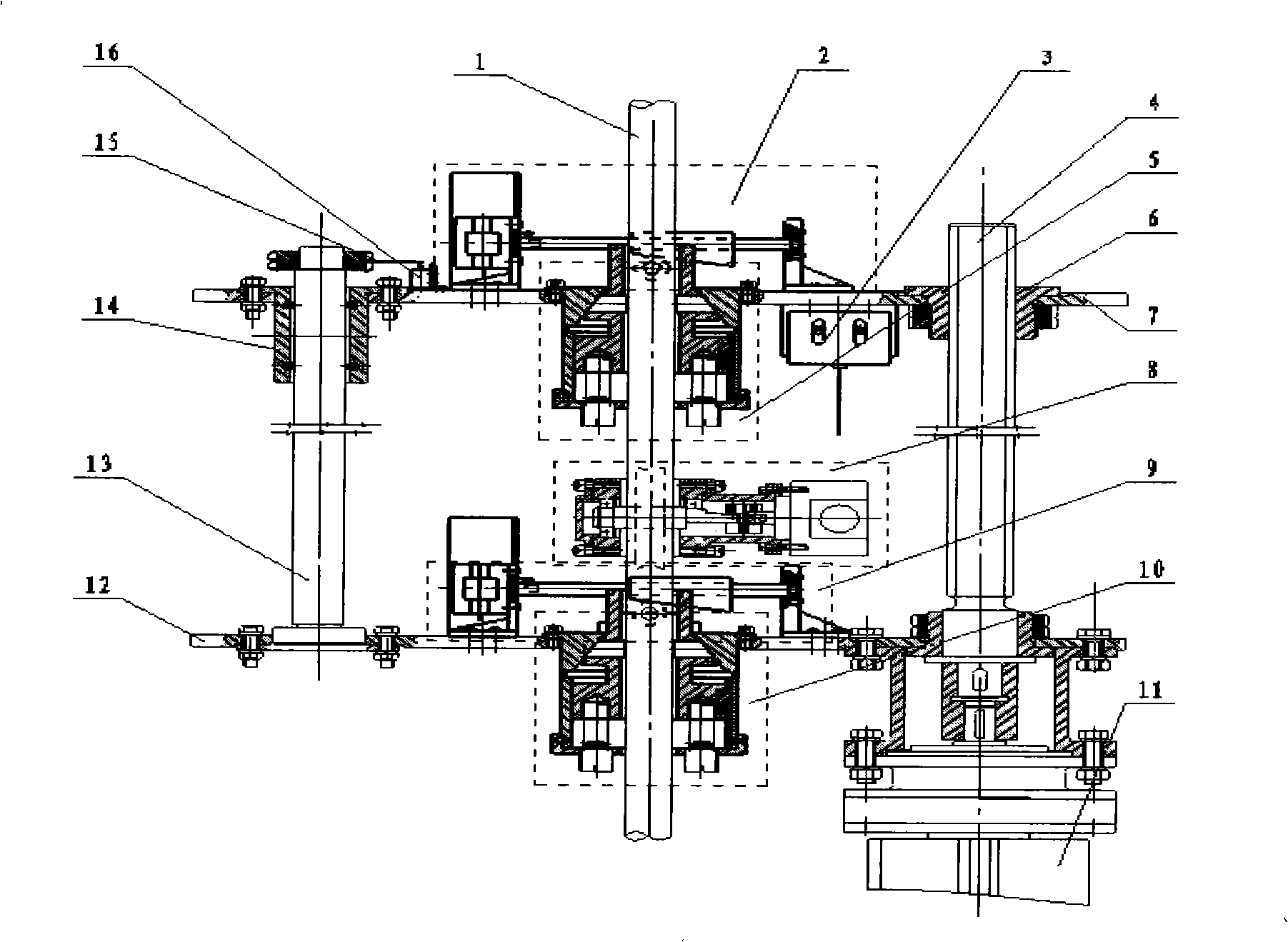
[0017] The technical solution of the present invention will be described in detail below through the examples and accompanying drawings.
[0018] The electric drive peristaltic cable robot of the present invention includes a climbing device, a clamping mechanism 5 and a clamping mechanism 10, a speed feedback device 8, an inner taper sleeve adjustment device 2 and an inner taper sleeve adjustment device 9, and the climbing device includes a drive motor 11. The upper machine board 7, the lower machine board 12, the driving screw 4, the nut 6, the light rod 13, the sensor 16, the trigger piece 15, and the sensor 3 are composed. The driving motor 11 is connected with the driving screw 4 through a coupling, and passed through The transition sleeve is fixedly connected with the lower machine plate 12, the nut 6 is fixedly connected with the upper machine plate 7, the nut 6 is screwed with the driving screw 4, one end of the polished rod 13 is fixed on the lower machine plate 12, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More