

Multivariable non-linear system prediction function control method based on Hammerstein model
A predictive function control and nonlinear system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as large amount of calculation, affecting the solution of control quantity, increasing the complexity of the controller, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
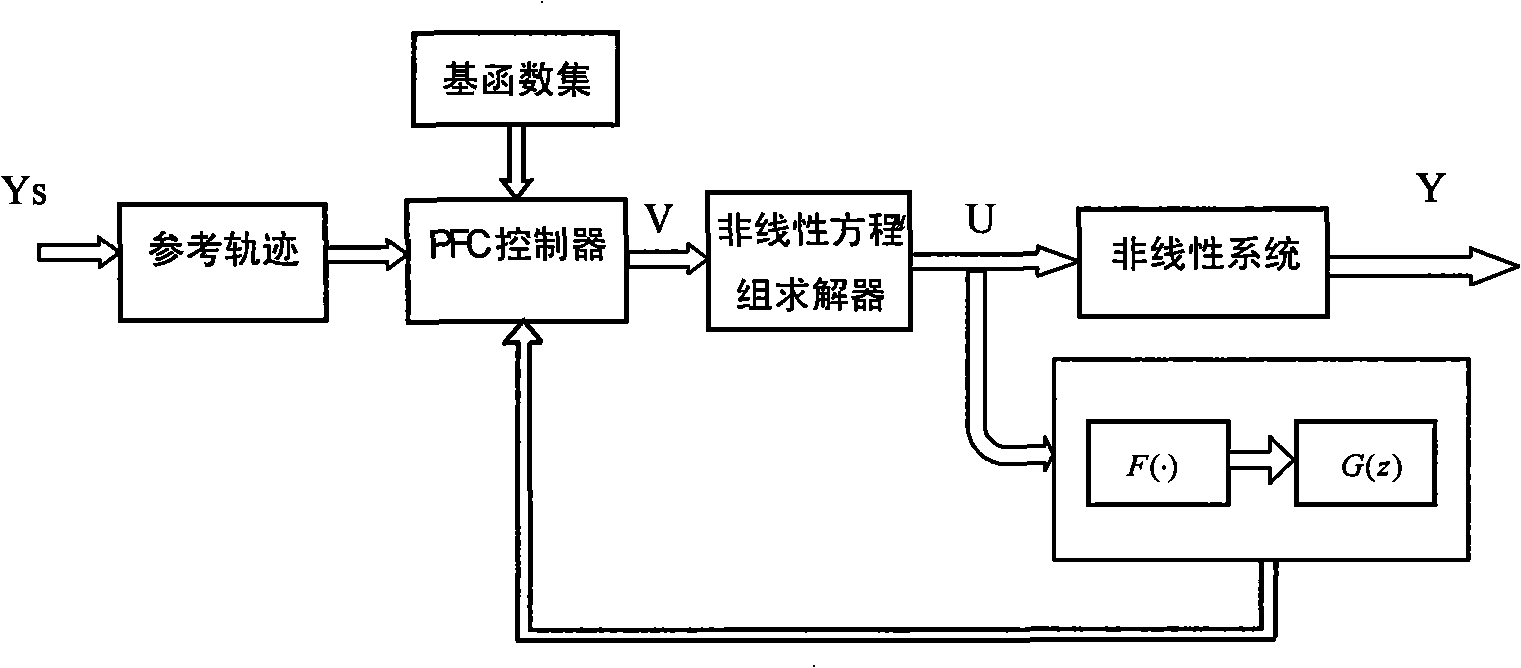
[0068] The predictive function control method for multivariable nonlinear systems based on the Hammerstein model includes the following steps:
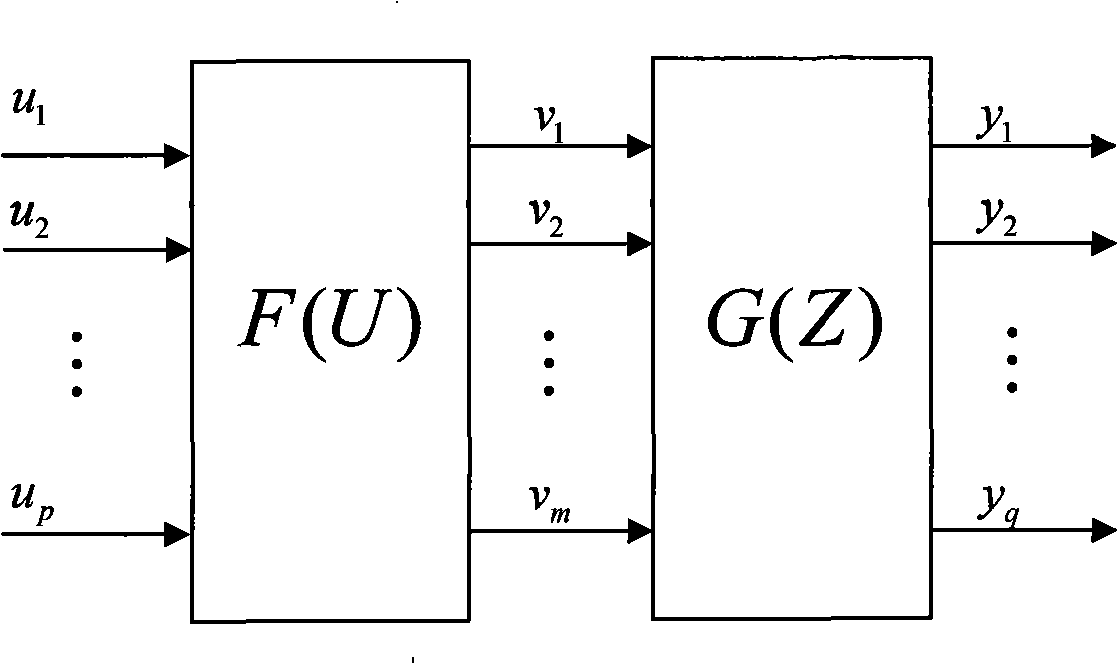
[0069] 1) Establish Hammerstein model according to process characteristics and input and output data;
[0070] 2) Solve the control rate of the prediction function of the multivariable linear system according to the model parameters of the linear part of the Hammerstein model, the set value and the actual process output;
[0071] 3) Solve the equation system V(k)=F(U(k)) according to the model parameters of the nonlinear part of the Hammerstein model and the control rate of the multivariable linear system prediction function to obtain the optimal control law U(k);
[0072] 4) Solve and implement the optimal control law according to the multivariable nonlinear predictive function controller.
[0073] The steps of establishing the Hammerstein model according to the process characteristics and input and output data:
[0074] The Hammer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More