

Robot for rehabilitation of anklebone
A technology for rehabilitation robots and ankle joints, which is applied in the directions of manipulators, gymnastics equipment, passive exercise equipment, etc., can solve the problems such as the difficulty of driving the moving pair P to move, and achieve the effects of easy manufacture and practical use, convenient power supply and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing thereof:
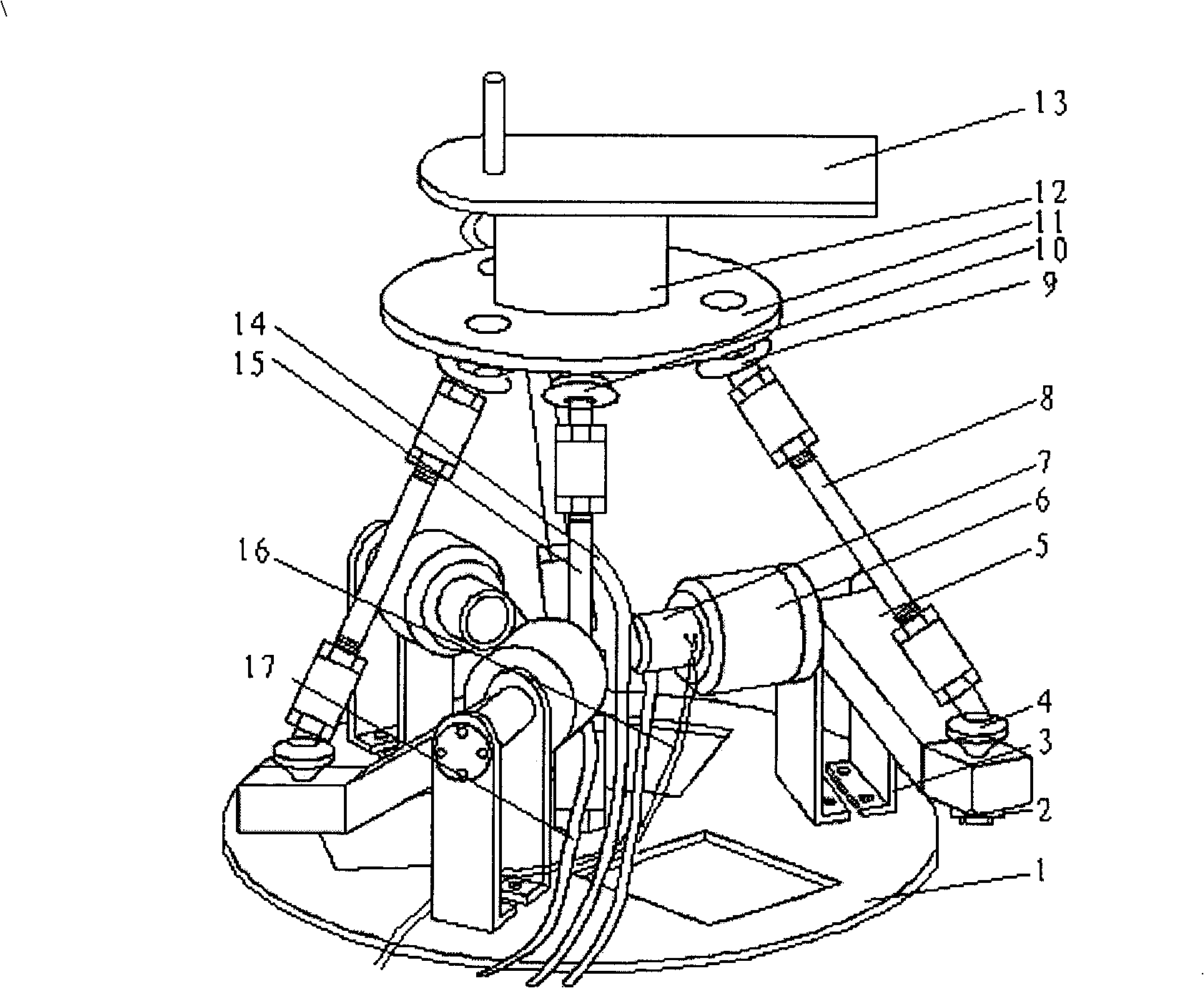
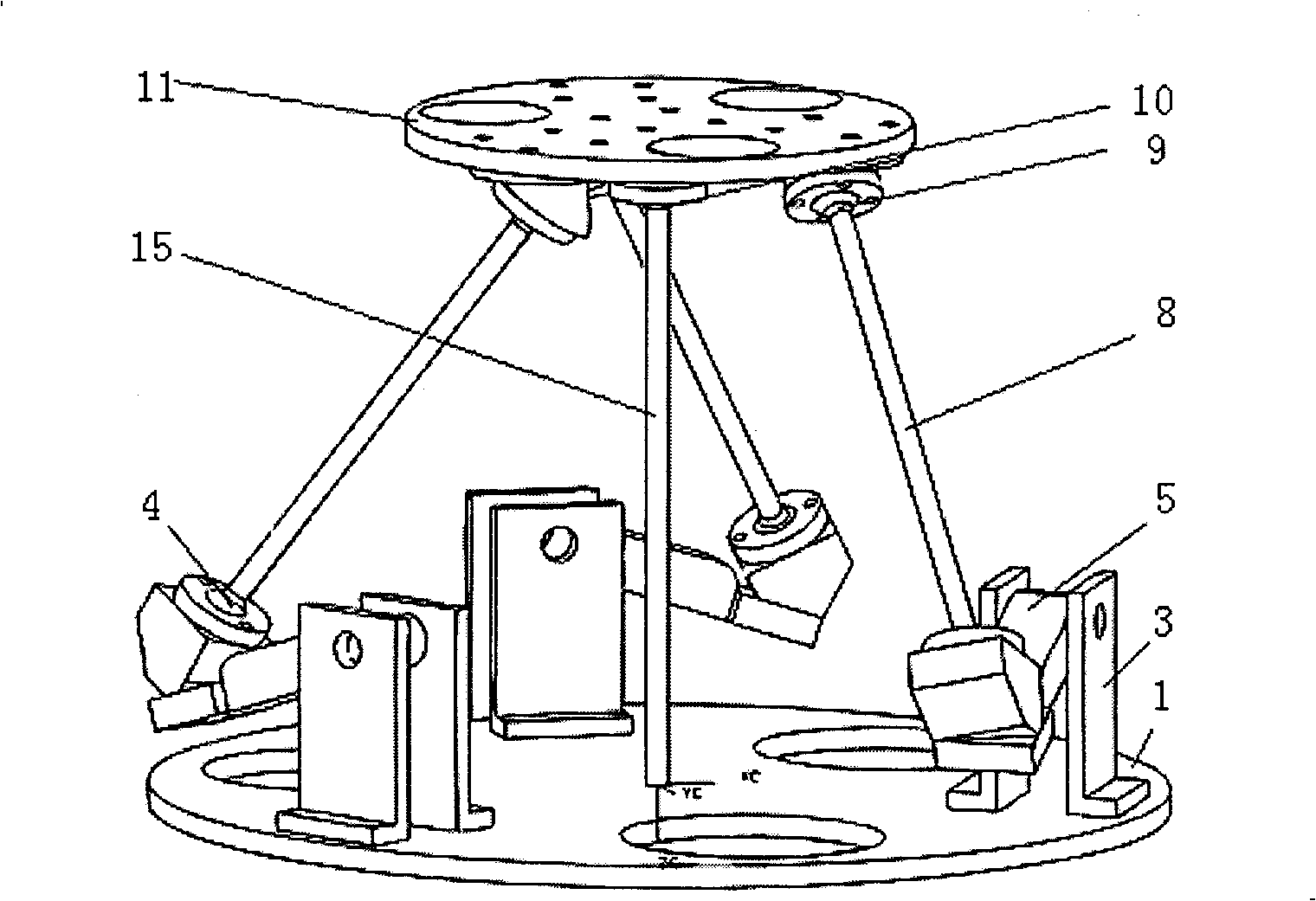
[0015] A kind of ankle rehabilitation robot designed by the present invention (hereinafter referred to as robot, see Figure 1-5 ), which includes mechanical parts, control parts and display parts. The mechanical part includes a base 1 and a moving platform 11, and three branch chains with the same structure and a central restraining rod 15 with a central spherical pair 10 are installed in parallel and evenly distributed between the base 1 and the moving platform 11, each The branch chains are all composed of revolving pair (crank) 5, lower spherical pair 4, connecting rod 8 and upper spherical pair 9 (ie 3-RSS / S structure, R-rotating pair, S-spherical pairing). The lower spherical pair 4 is fixed on the end of the rotating pair (crank) 5 by the bolt 2, the lower spherical pair 4 is connected with the upper spherical pair 9 through the connecting rod 8, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More