

Polynomial forecast model of maneuvering target state equation and tracking method
A maneuvering target and state equation technology, which is applied in image data processing, instrumentation, calculation, etc., can solve the problems of large nonlinearity, large amount of calculation, and deterioration of tracking performance, and achieves the effect of simple form and avoiding dependence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
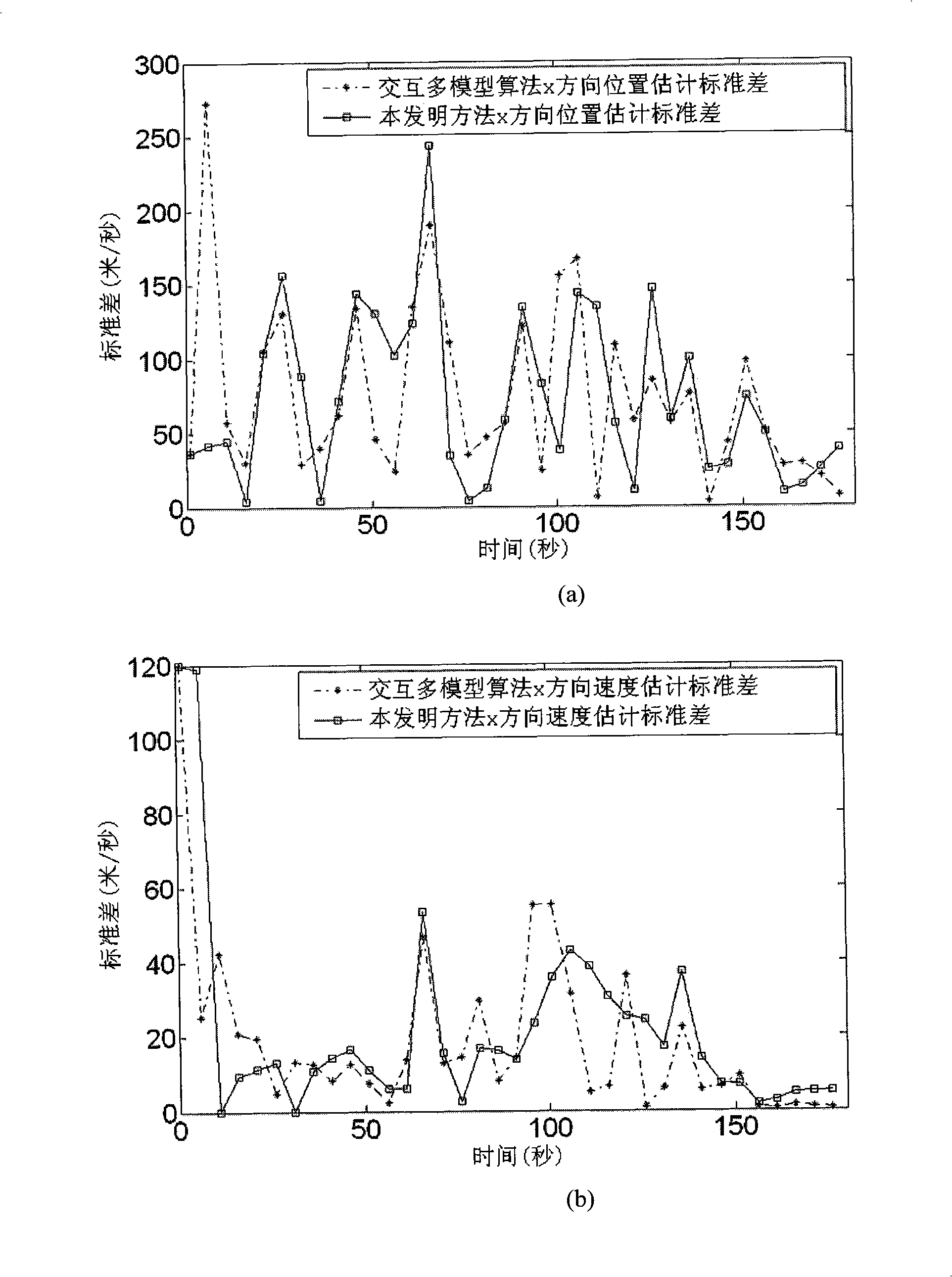
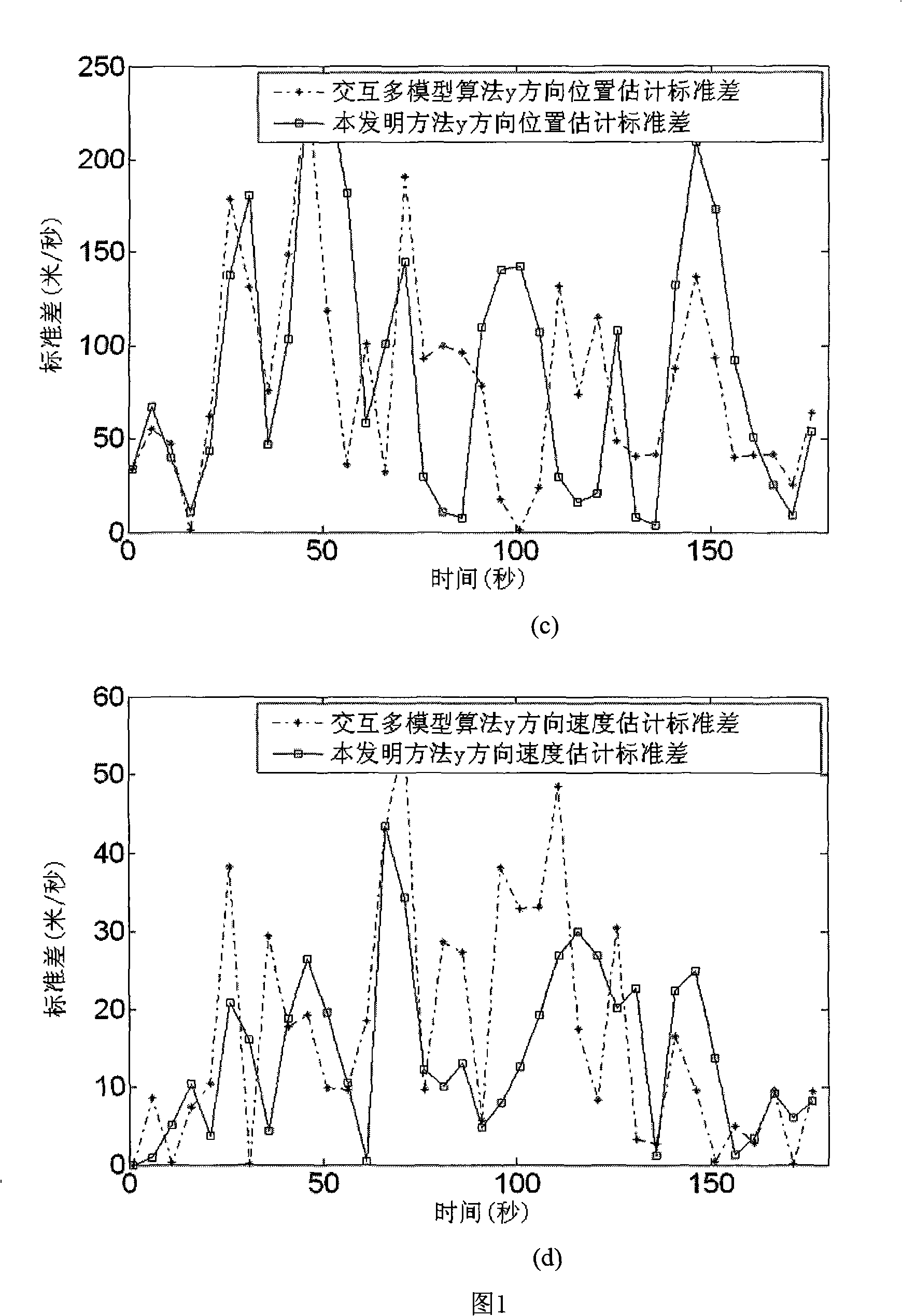
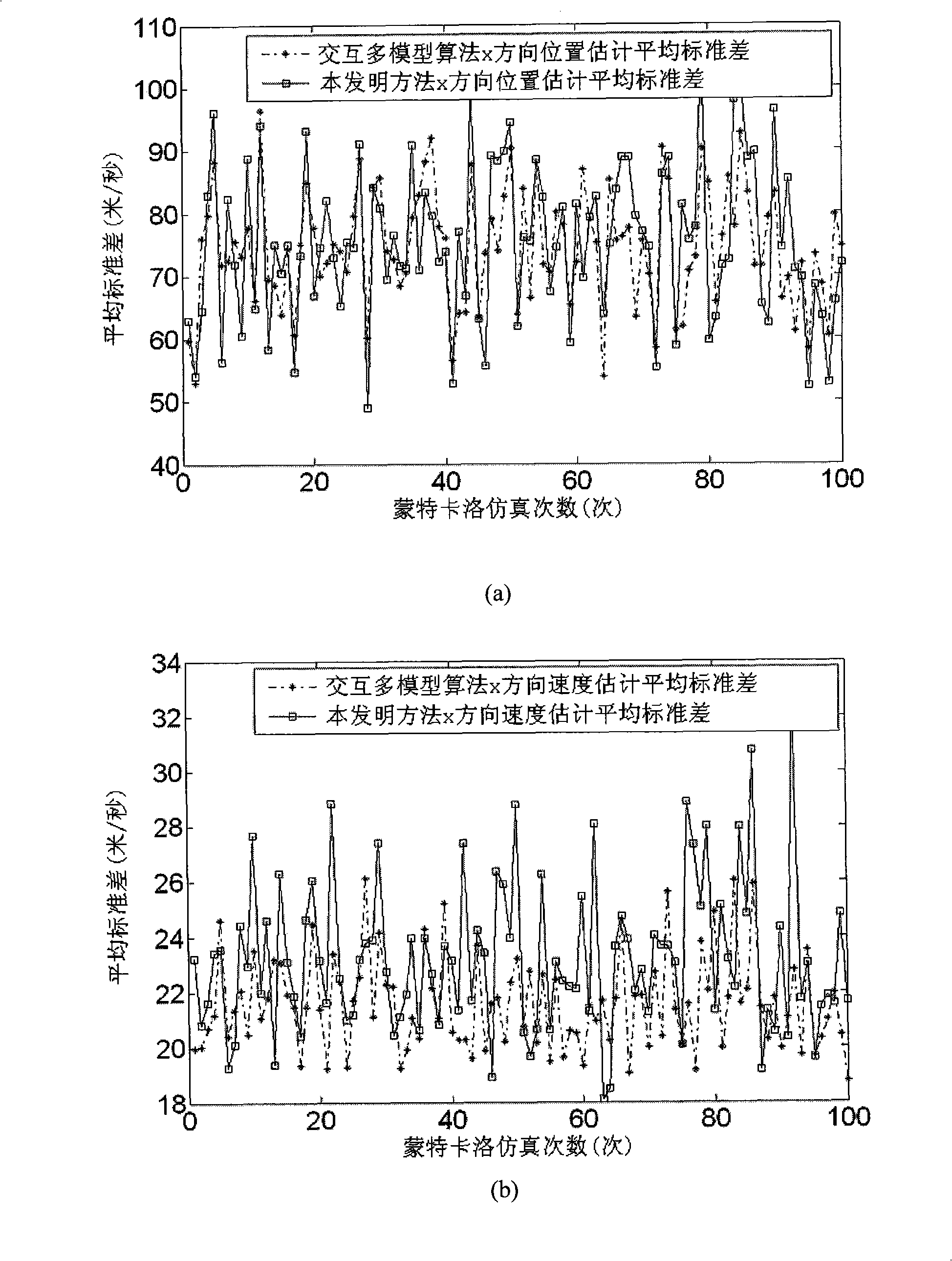
[0083] For maneuvering target tracking simulation 1, it is assumed that the target is within 0-60 seconds and the process noise standard deviation is 0.2 m / s 2, 61-120 seconds process noise standard deviation is 10 m / s 2 , 120-180 seconds process noise standard deviation is 0.2 m / s 2 , the measurement noise standard deviation is 100 meters. First, the polynomial model of L=2, K=3 is used to model the target position, and the polynomial model of L=1, K=2 is used to model the target speed; then the position and speed of the target are estimated respectively, that is, within a cycle, First use our polynomial model and its corresponding tracking algorithm (20)-(25) to estimate the position of the target according to the measured value; then use the difference of the estimated position as the measured value of the target speed, also use the polynomial model and its corresponding The tracking algorithm estimates the target velocity. When judging the mean value of new information ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More