

Orbit movement target parameter estimation system based on transient relative model
A relative model and motion parameter technology, applied in the field of navigation system, to achieve the effect of wide application space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
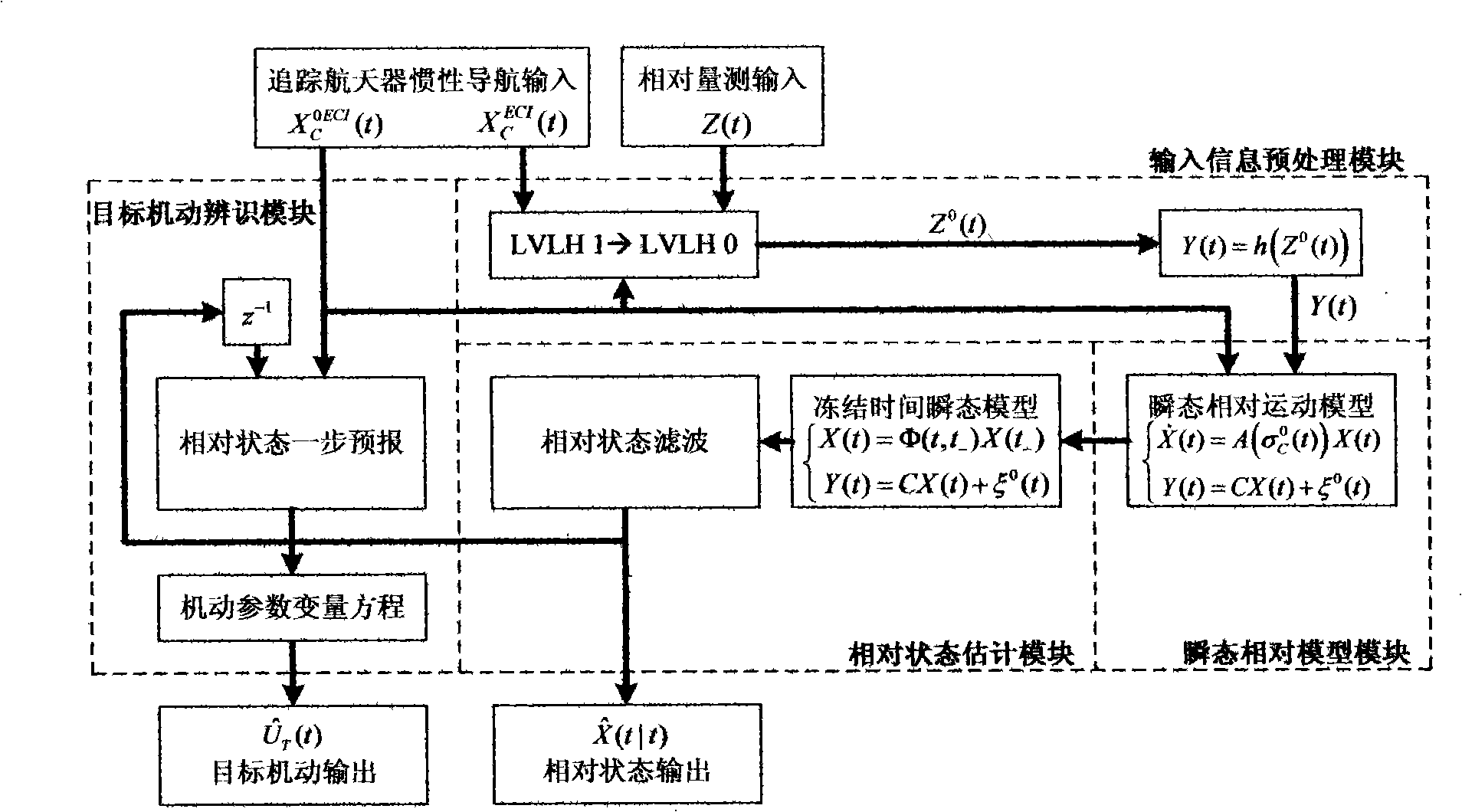
[0030] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
[0031] The initial state of the two stars in this embodiment is shown in Table 1.
[0032] Table 1 Initial state of inertial space
[0033]
[0034] The relative position standard deviation is 1m, and the relative speed standard deviation is 0.1m / s. The noise standard deviation of distance measurement is 1m, the angle standard deviation is 0.001rad, and the measurement sampling period is 0.5s. From the 300th second, the target spacecraft exists 0.5m / s in the radial direction and longitudinal direction 2 continuous maneuver for 5 minutes. When the tracking star is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More