

Nuclear pollution detecting method based on remote operating mobile robot
A mobile robot and pollution detection technology, applied in chemical method analysis, instruments, measuring devices, etc., can solve the problems of high risk, low reliability, and large volume of nuclear chemical processing personnel, and achieve the effect of flexible methods and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The nuclear pollution detection method based on the remote operation mobile robot of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
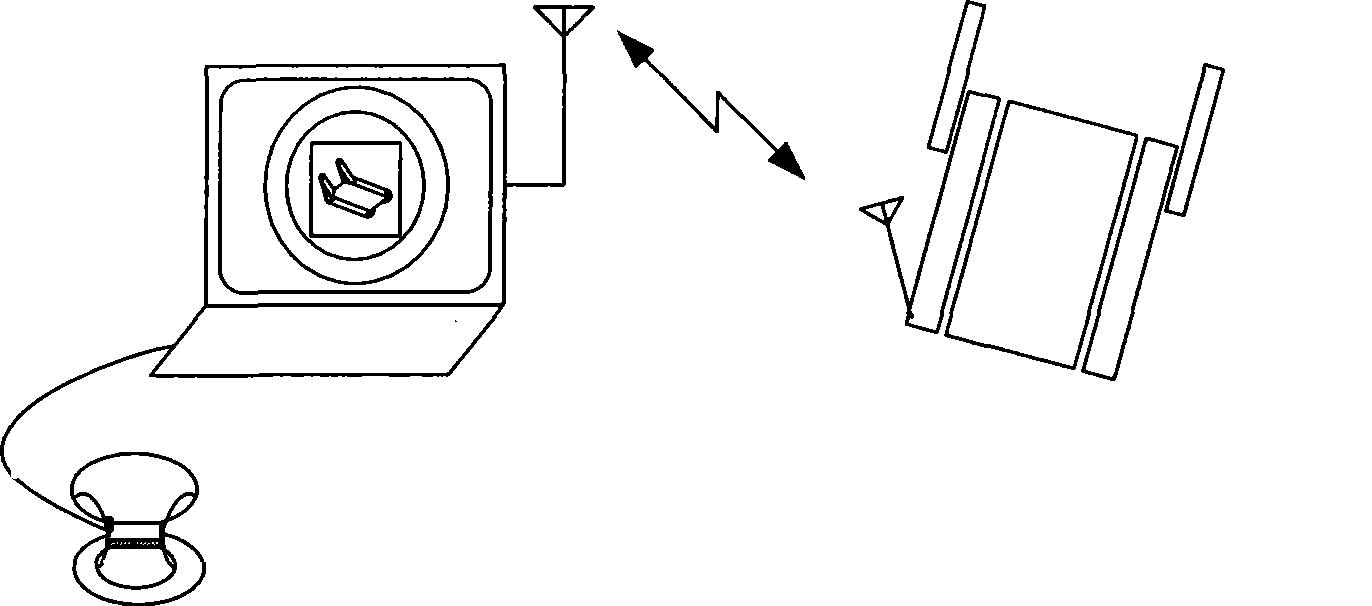
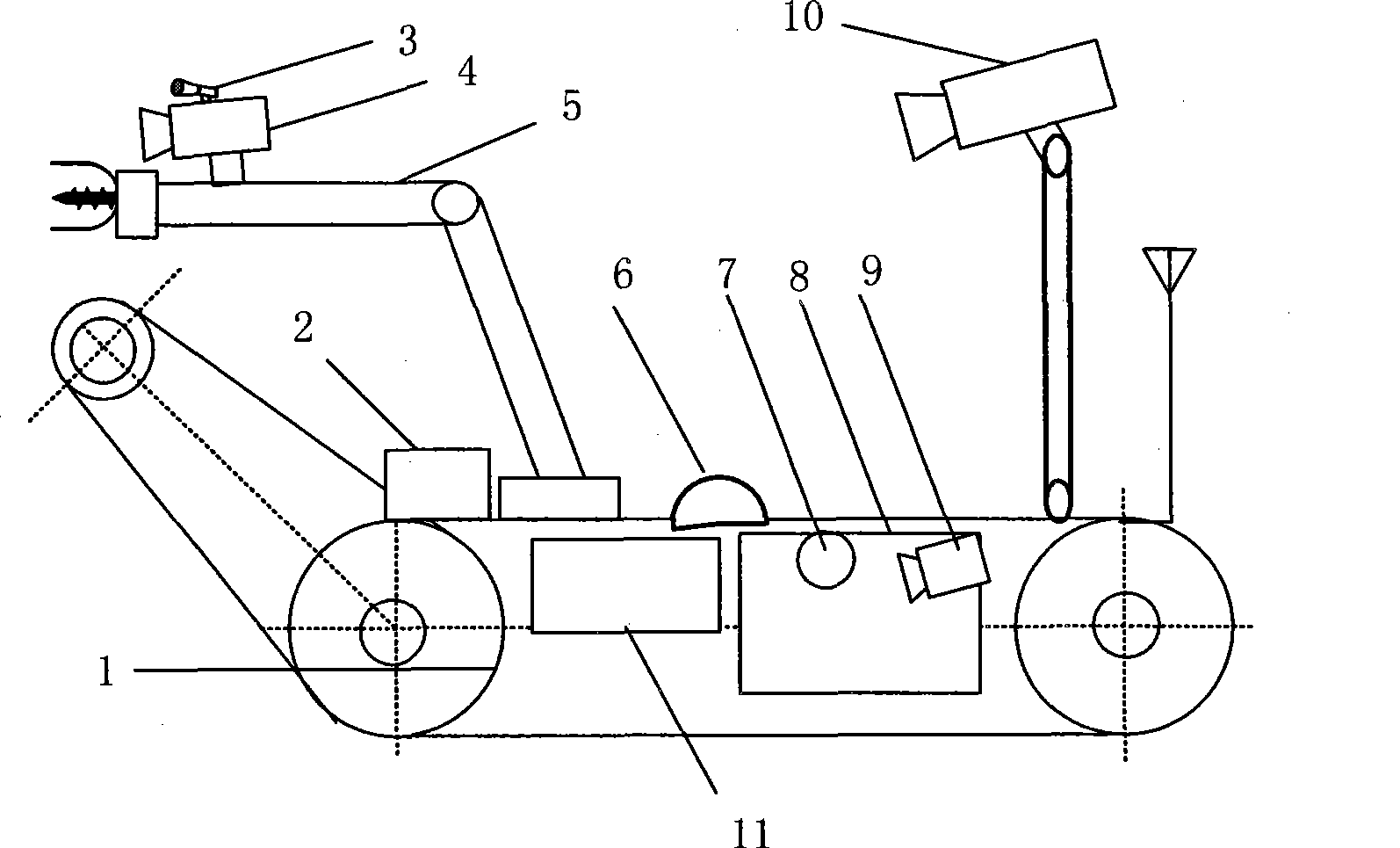
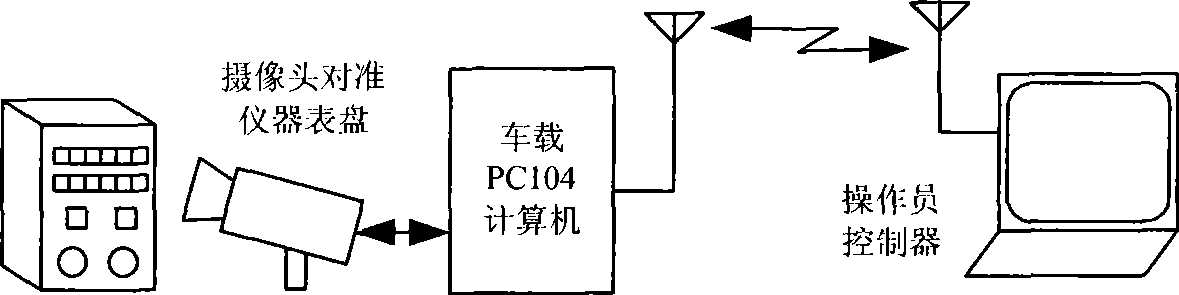
[0018] like figure 2 As shown, the nuclear pollution detection method based on the teleoperation mobile robot includes a teleoperation mobile robot 1, a nuclear detector 2 installed on the robot body, an instrument cabin 8, a sampling manipulator 5, an Internet radio station 11, and a radio station installed above the manipulator. Microphone 3, also have the first video camera 4 that is respectively positioned at sampling mechanical arm top, the second video camera 10 above the tail bracket, the 3rd video camera 9 and the GPS positioning navigator 6 in the instrument cabin 8.
[0019] The functions of each part are described as follows:
[0020] (1) Nuclear radiation analysis detector 2: used to detect the intensity of nuclear radiation at the accident site...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More