

Earth-air special-shaped multi-robot searching and rescuing system
A technology of multi-robots and robots, which is applied in the directions of instruments, measuring devices, surveying and navigation, etc., to achieve the effect of improving disaster prevention/disaster resistance ability and rescue level, improving accuracy and rescue efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
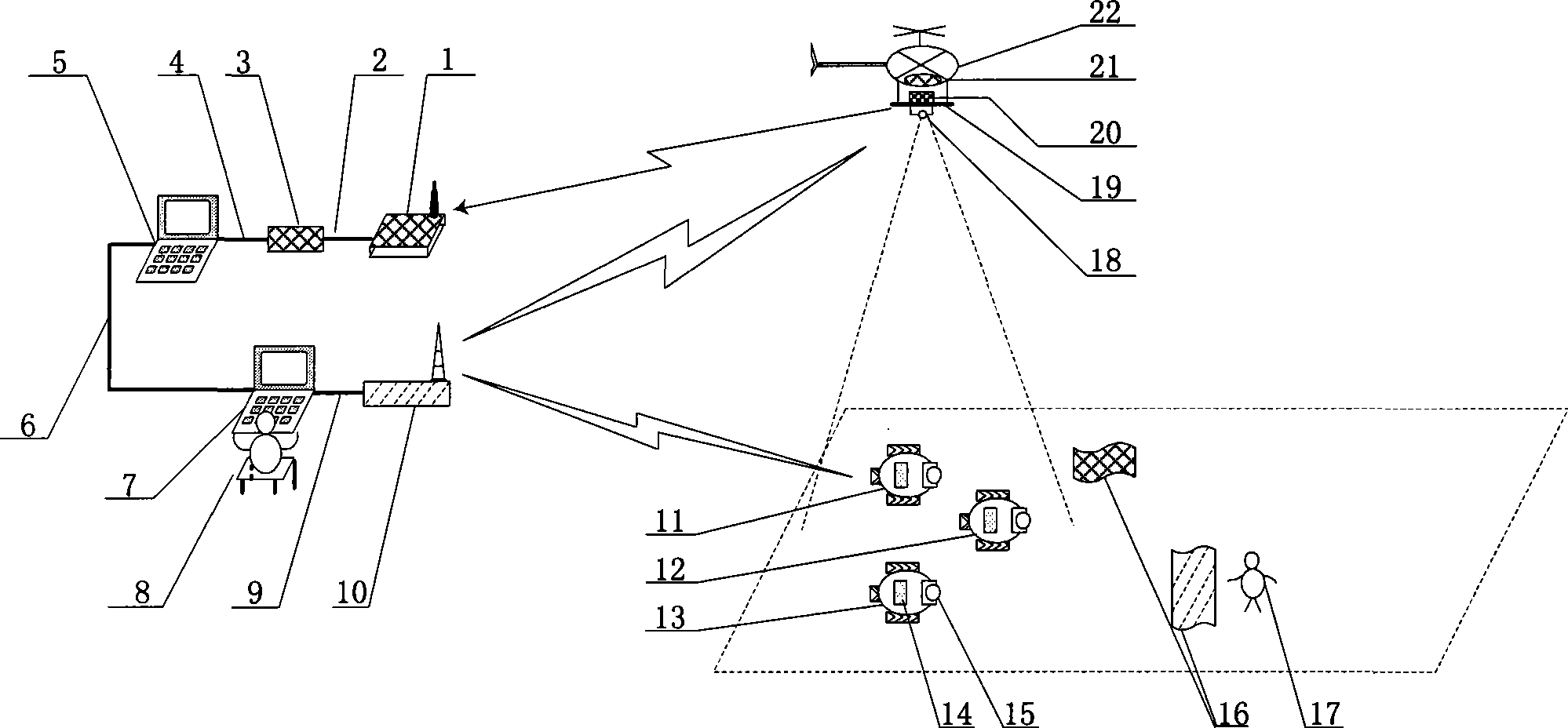
[0025] In this example, there is one flying robot 22 in the air and three rescue robots 11, 12, and 13 on the ground as an example for illustration.
[0026] After the search and rescue work starts, in order to collect timely and correct information on the search and rescue scene, the ground search and rescue command personnel 8 first dispatch flying robots 22 to conduct reconnaissance on the search and rescue scene, which is used to collect geographic information on the search and rescue scene and related buildings, and to collect information on obstacles and obstacles. Work with the location and positioning of the target to be rescued. The flying robot 22 sends the collected on-site environment information into the image processing computer 5 for processing, and after detecting the obstacle 16 and the target 17 to be rescued in the environment information, their position information is then passed into the monitoring computer 7, And then released to the ground rescue mobile ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More