

Vehicle-mounted SINS/GPS combined navigation system performance reinforcement method
A technology of integrated navigation system and performance, applied in the field of performance enhancement of vehicle-mounted SINS/GPS integrated navigation system, can solve the problems of low system accuracy and poor reliability, and achieve the effect of improving accuracy and reliability and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
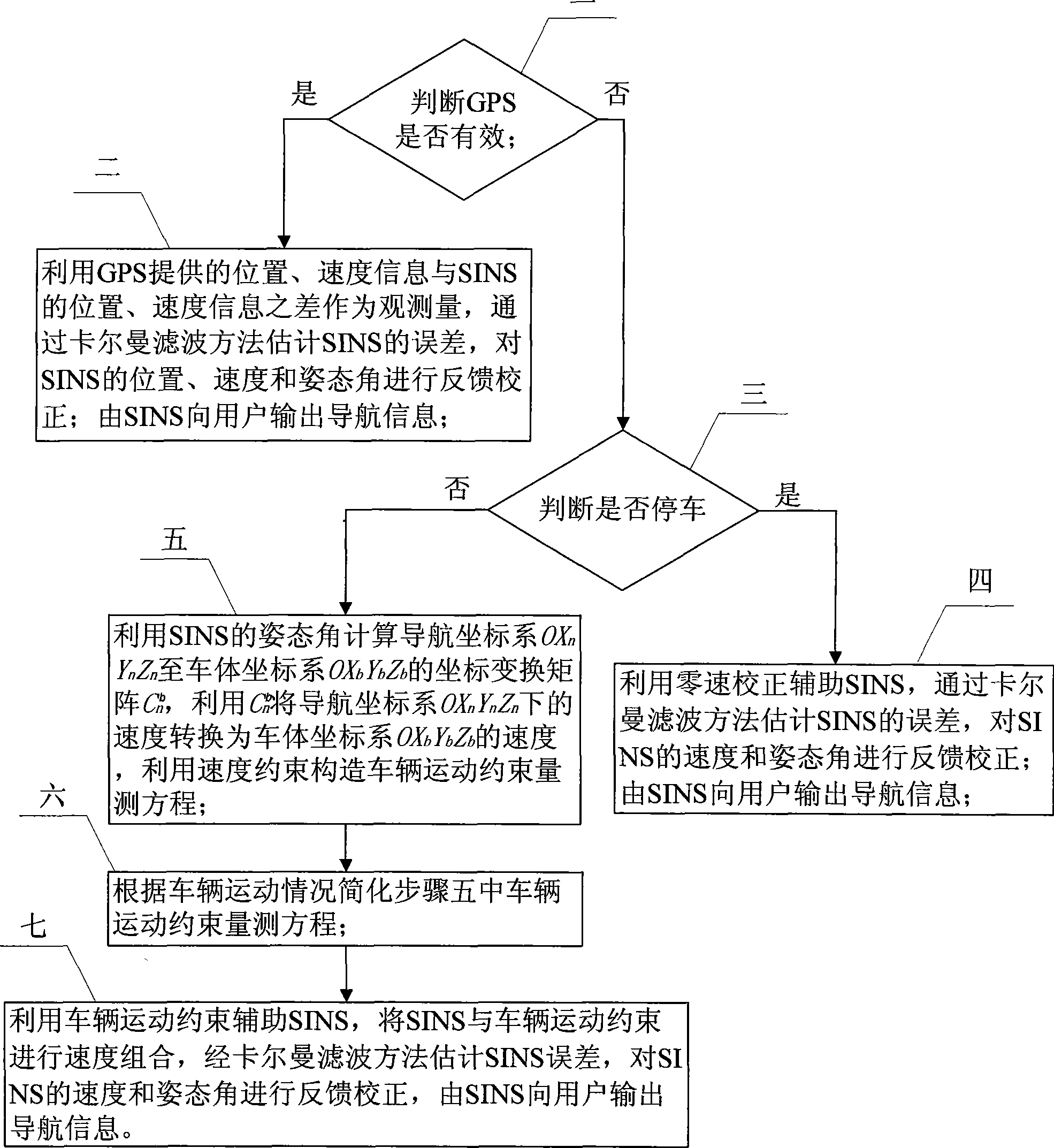
[0018] Specific implementation mode one: combine figure 1 Describe this embodiment, the steps of this embodiment are as follows:
[0019] Step 1: Determine whether the GPS is valid; if yes, go to step 2; if not, go to step 3;
[0020] Step 2: Use the difference between the position and velocity information provided by GPS and the position and velocity information of SINS as the observation quantity, estimate the error of SINS through the Kalman filter method, and perform feedback correction on the position, velocity and attitude angle of SINS, and send the information from SINS to The user outputs navigation information;
[0021] Step 3: Determine whether to stop; if yes, go to step 4; if not, go to step 5;
[0022] Step 4: Use zero-speed correction to assist SINS, estimate the error of SINS by Kalman filter method, perform feedback correction on the speed and attitude angle of SINS, and output navigation information to the user from SINS;
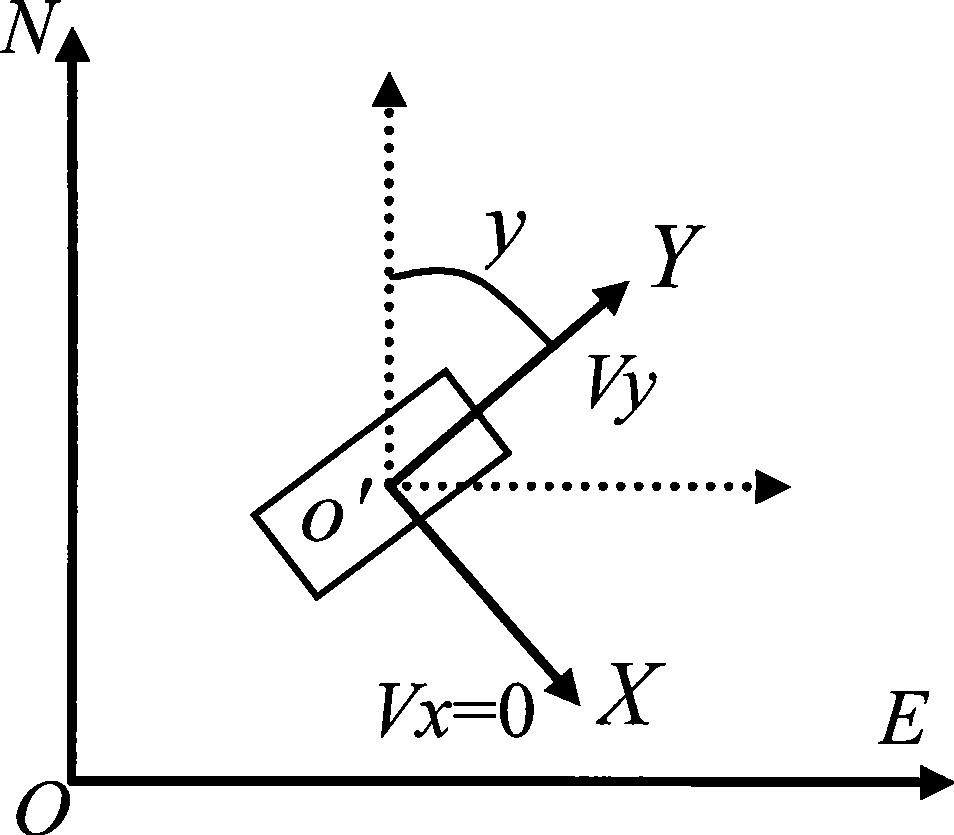
[0023] Step 5: Use the attitude ...
specific Embodiment approach 2
[0026] Specific embodiment two: the difference between this embodiment and specific embodiment one is that step two is the navigation process when GPS is valid;
[0027] First, establish the mathematical model of SINS / GPS integrated navigation, including system equations and measurement equations.
[0028] The system equation is the SINS error equation ignoring the height channel, as shown in formula (1):
[0029] X . 1 ( t ) = F 1 ( t ) X 1 ( t ) + w 1 ( t ) - - - ( 1 )
[0030] x 1 is the system equation state vector, ...
specific Embodiment approach 3
[0061] Specific embodiment three: the difference between this embodiment and specific embodiment two is that step four is the navigation process when the GPS is invalid and in the parking state;
[0062] Firstly, the mathematical model of zero-speed correction assisted SINS is established, in which the system equation is the same as (1), and the measurement equation is:
[0063] Z 2 =H 2 x 1 +v 2 (10)
[0064] v 2 is the observation noise, the observation matrix H 2 for
[0065] h 2 =[0 2×3 I 2×2 0 2×7 ] 2×12 (11)
[0066] Observation Z 2 for
[0067] Z 2 =[V ESINS -V E V NSINS -V N ] T =[V ESINS V NSINS ] T (12)
[0068] Finally, the error of SINS is estimated by Kalman filter method, and the velocity and attitude angle of SINS are corrected by feedback. Other steps are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More