

Modularization robot based on CORBA connector
A robot and modular technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inconsistency and high complexity of robot module integration, and achieve the effect of convenient integration, convenient integration and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
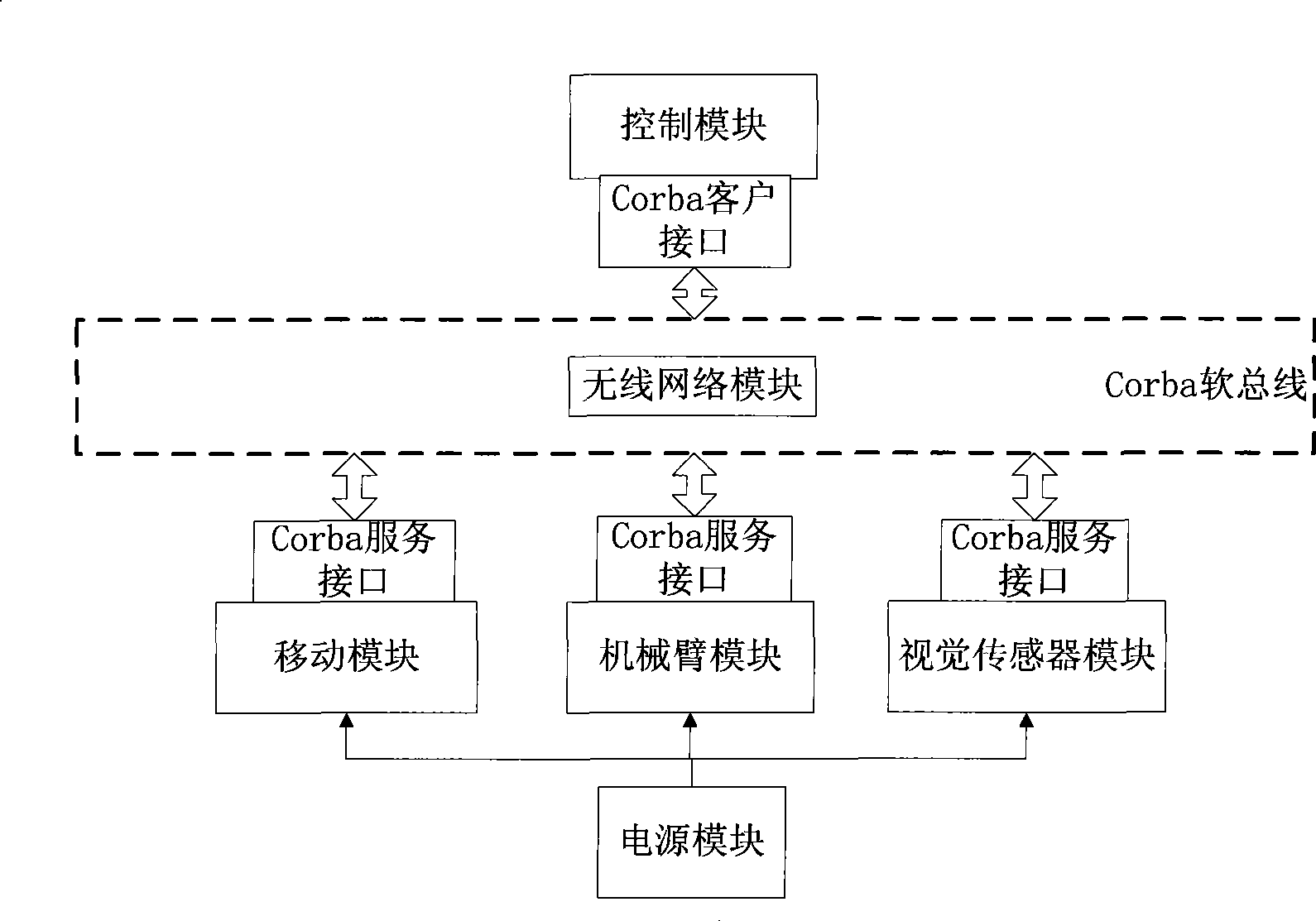
[0022] The CORBA-based robot modular design method proposed in this embodiment is mainly reflected in adding a software control interface conforming to the CORBA interface specification for each robot module, and using the CORBA specification to use the computer network as the medium to establish a CORBA soft bus. Each module can be connected to the CORBA soft bus through its software interface, providing CORBA services to other modules, simplifying the integration of each module, and reducing the complexity of the control program.
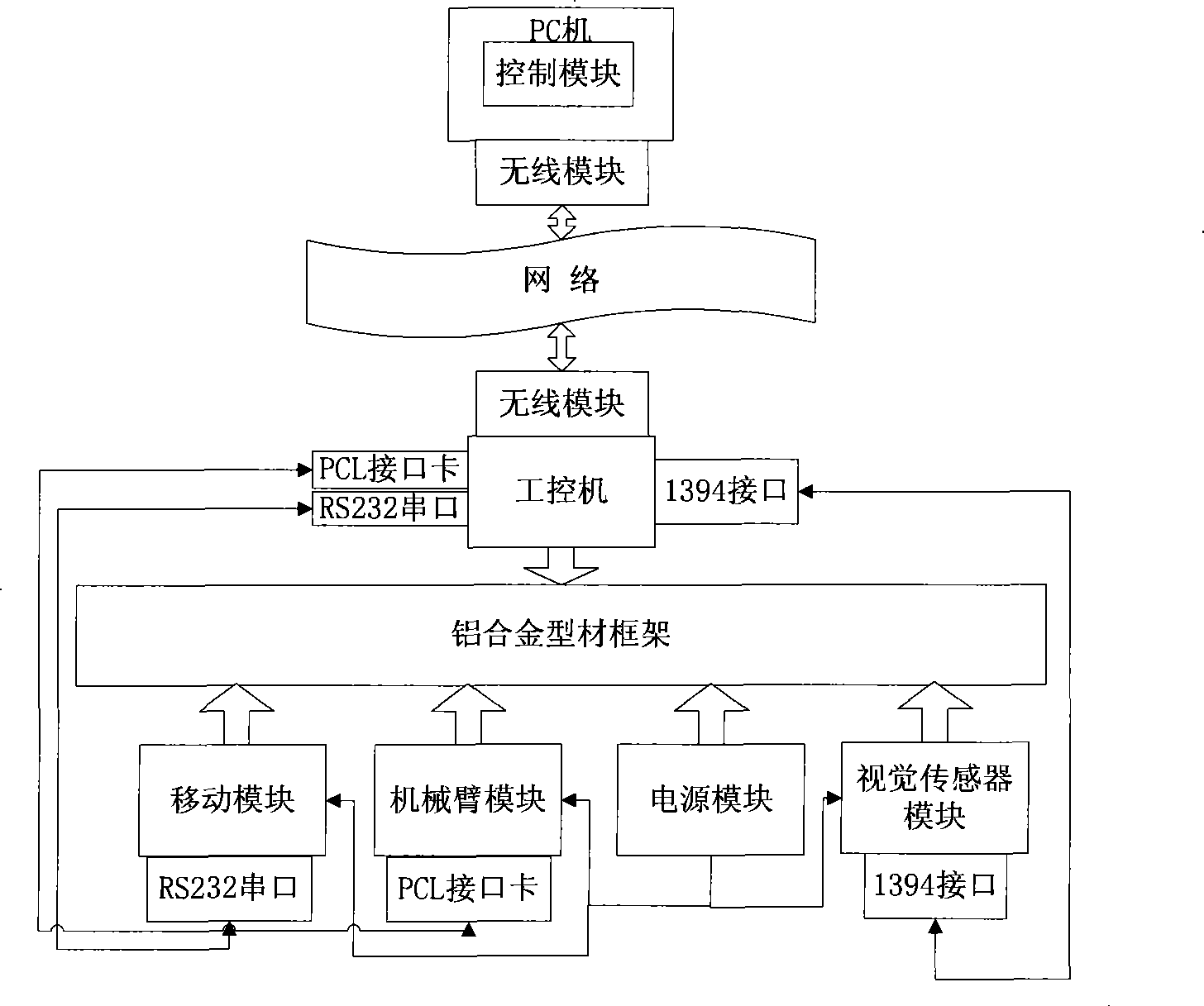
[0023] Such as Figure 1-2 As sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More