

Device and method for detecting length and motion directions of hitched ropes of underwater robots
A technology for underwater robots and moving directions, which is applied in the direction of transmitting sensing components using electric/magnetic devices, which can solve problems such as the length distortion of the mooring cable, the misjudgment of the operator, and the inability to detect the mooring cable, etc., to achieve good inheritance , Simple installation and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
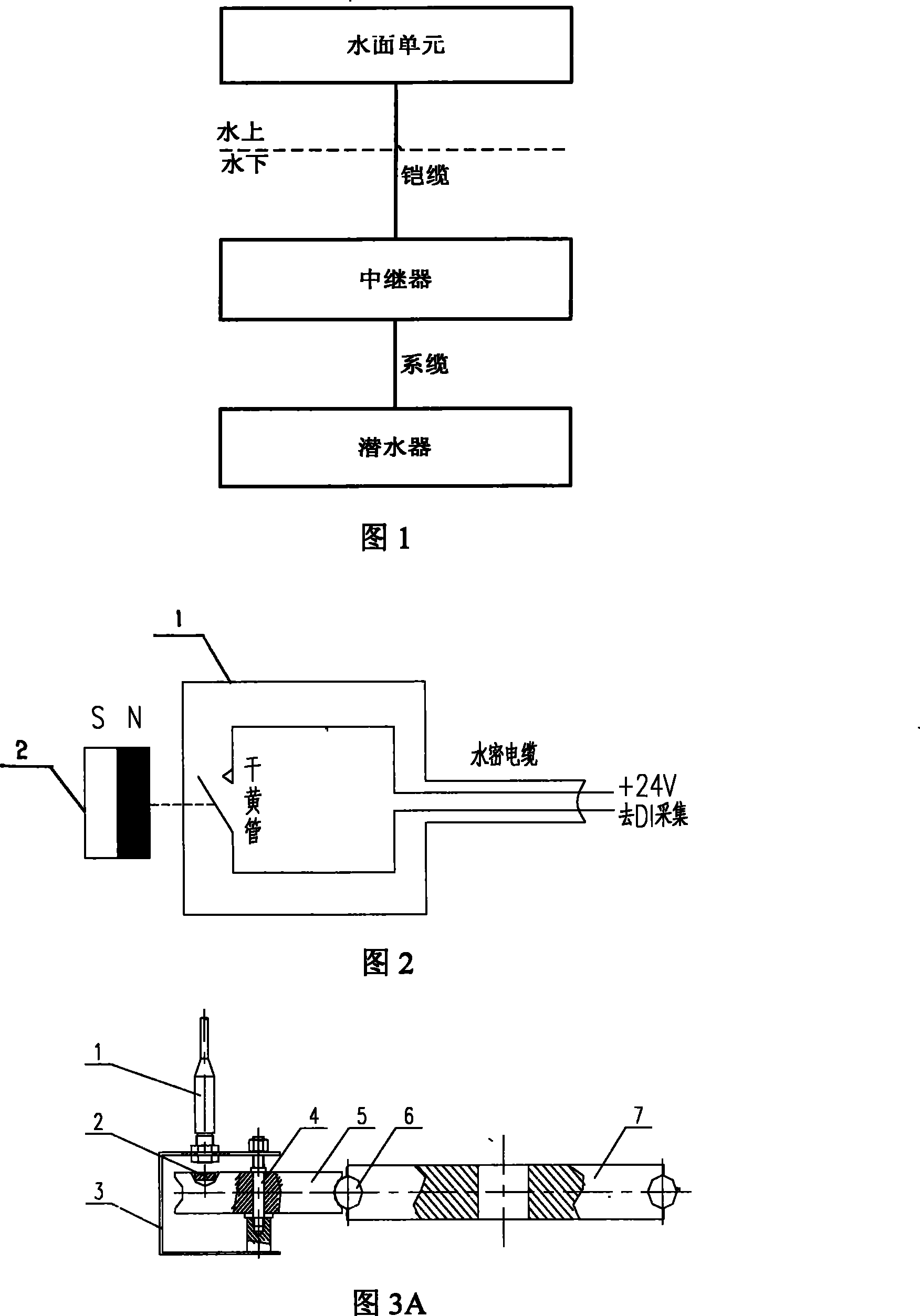
[0027] As shown in Figure 1, the underwater robot mainly includes three parts: the surface unit, the repeater and the submersible. The surface unit is located above the water surface and connected to the repeater through armored cables. connected. There are power lines, twisted pairs and optical fibers inside armored cables and tethered cables. The power line is used to transmit power from the water to the repeater and submersible, the twisted pair is used to transmit data or signals, and the optical fiber is used to transmit video and data. The armored cable has an armored layer on the outside. The armored cable mainly serves two functions, one is to transmit power and signals, and the other is to serve as a load-bearing cable for lifting repeaters and submersibles. Armored cable, release the repeater and submersible to a certain operating depth under the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More