Spirally driven walking robot in pipe
A walking robot and spiral-shaped technology, applied in the field of robots, can solve problems such as low efficiency, difficult processing, and difficulty in popularization and application, and achieve the effects of low processing and manufacturing costs, simple structure, and stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
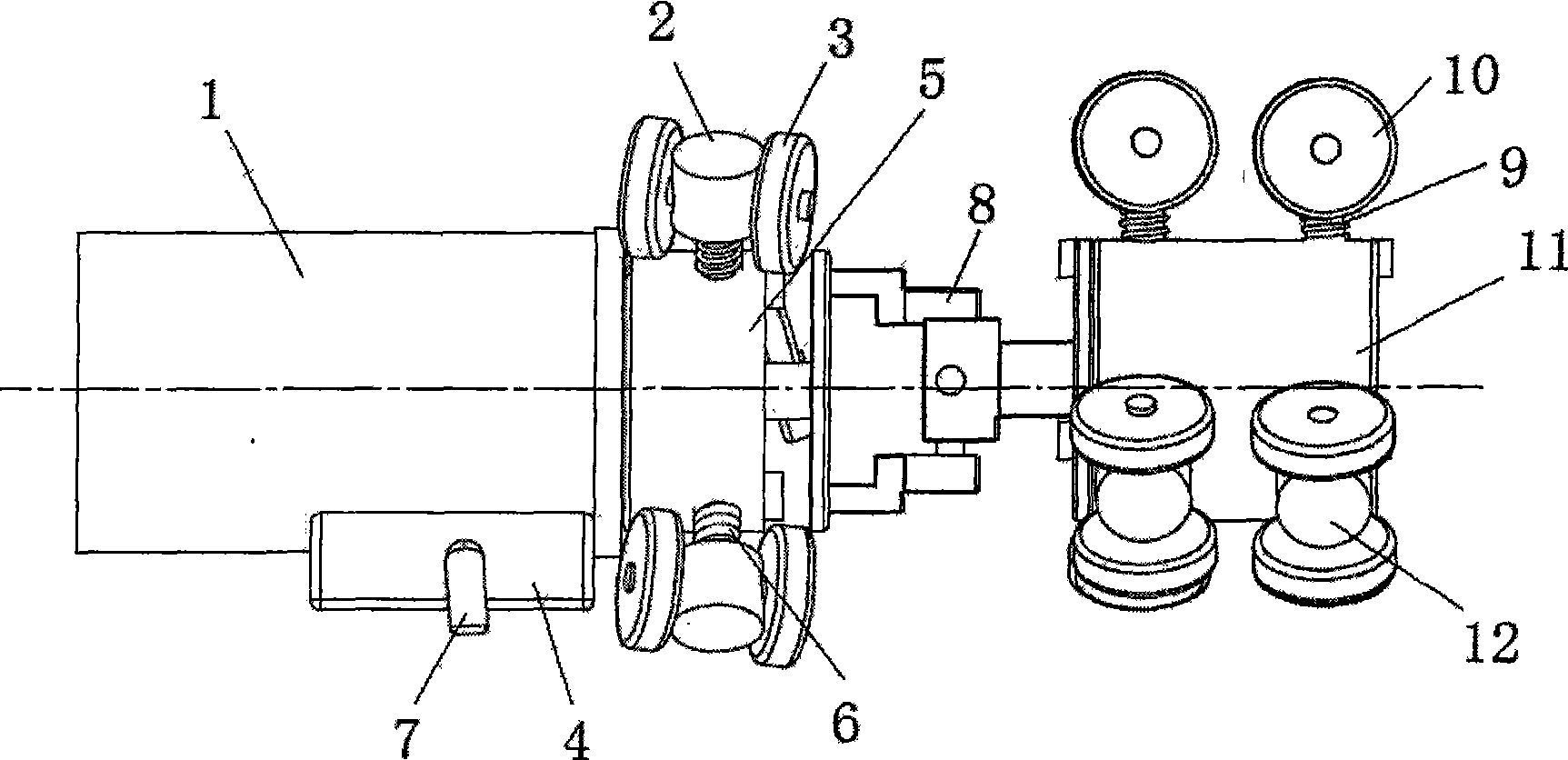
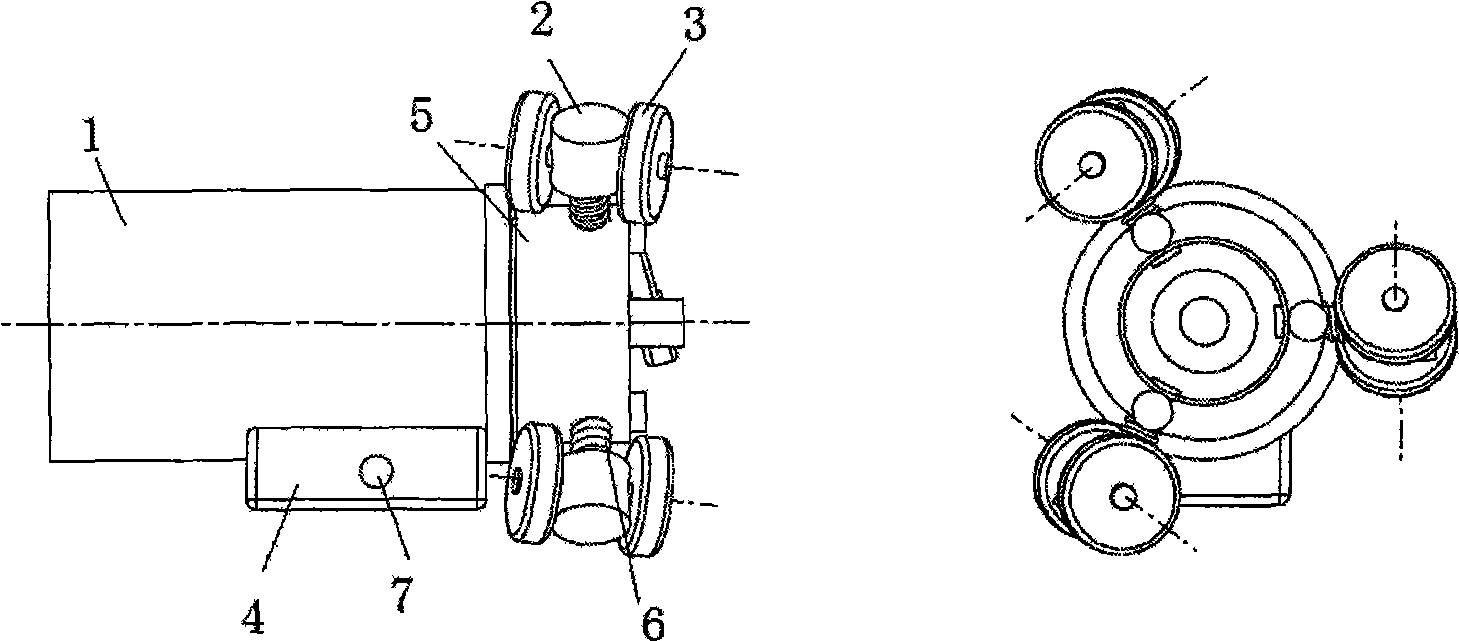
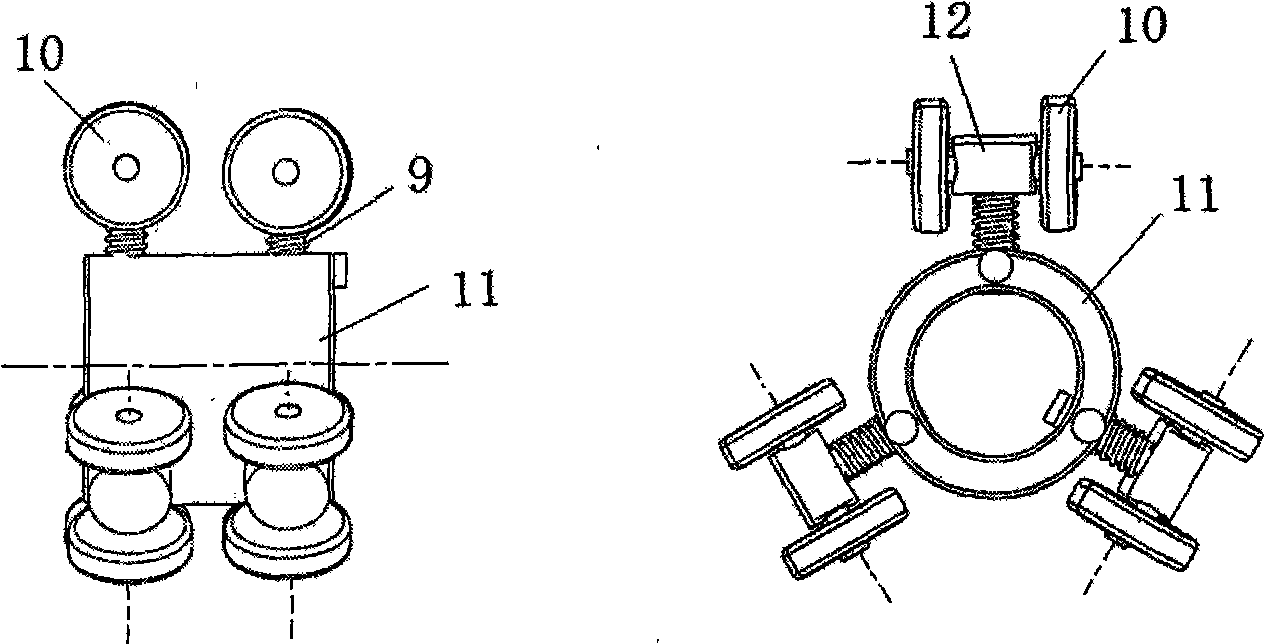
[0010] As an example, such as figure 1 Shown, the present invention can be made up of power drive unit, walking guide and the universal joint 8 that connects these two parts, power drive unit ( figure 2 ) is composed of a circular rotor 5 driven by a motor 1. Three sets of symmetrically arranged wheel frames 2 are installed on the outer wall of the circular rotor 5, and two wheels 3 are installed on each wheel frame 2. The rotation axis of the wheels 3 is in line with the rotor The axis of 5 is an acute angle of inclination; and the walking guide ( image 3 ) is composed of three sets of symmetrically arranged guide wheel frames 12 on the outer wall of a cylinder or cylindrical body 11, and two wheels 10 are also installed on each group of guide wheel frames 12, and the rotation axis of the wheels 10 is in line with the column or cylindrical body The axes of 11 are perpendicular to each other. The link between the two parts of the power drive and the walking guide can be a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More