

Wall mobile robot based on air lift
A mobile robot and lifting technology, applied in the field of robotics, can solve the problems of slow movement speed, difficult adaptation of robots, and high noise, and achieve the effects of strong wall adaptability, light weight, and low noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in more detail below in conjunction with the accompanying drawings as an example. The walking mechanism along the wall of the present embodiment is a wheeled moving mechanism.
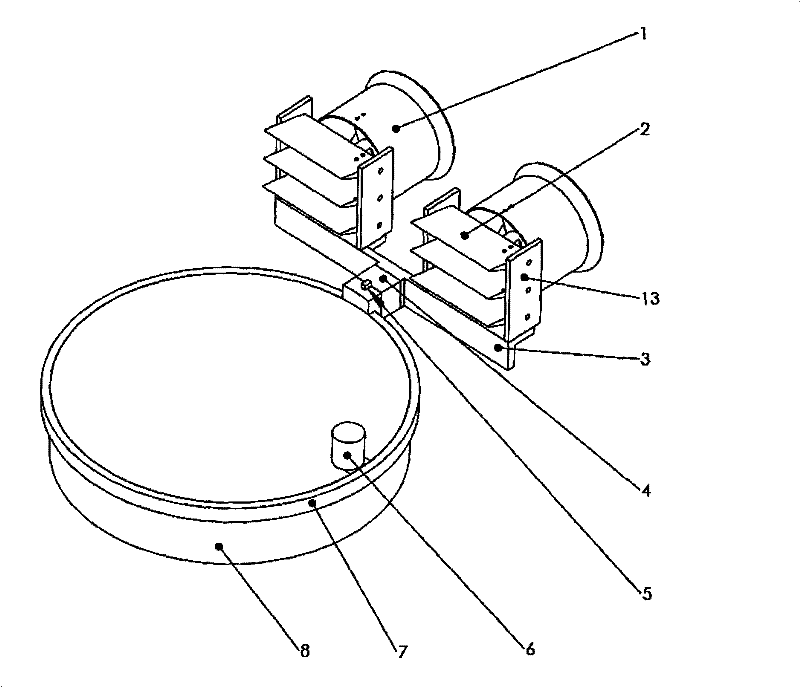
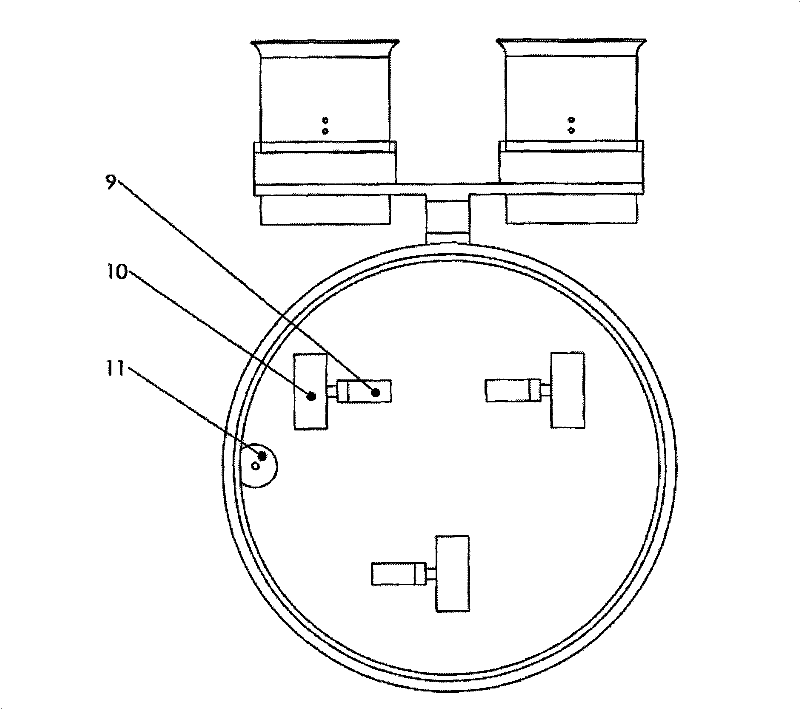
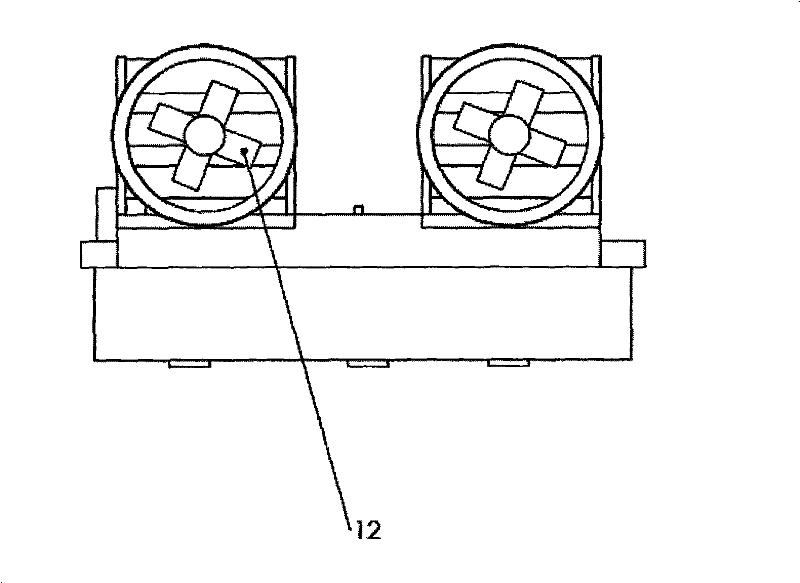
[0025] figure 1 It is a perspective view of an embodiment of the present invention; figure 2 It is a rear view of the structure of the embodiment of the present invention; image 3 It is a structural top view of an embodiment of the present invention; Figure 4 It is a structural side view of an embodiment of the present invention.
[0026] combine Figure 1 to Figure 4 , the wall mobile robot based on airflow lift of the present invention includes a lift generating device, a lift direction adjustment mechanism and a walking mechanism along the wall.
[0027] The lift generating device includes a ducted fan 1 and guide vanes 2. The ducted fan 1 is composed of a ducted pipe, a skeleton fixed in the ducted pipe, a driving motor fixed on the skeleton, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More