

Aerial Cable Climbing Robot Clamping Mechanism
An overhead cable and clamping mechanism technology, applied in the field of robots, can solve the problems of low efficiency, poor adaptability, complex clamping structure, etc., and achieve the effect of wide application range, high clamping efficiency and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
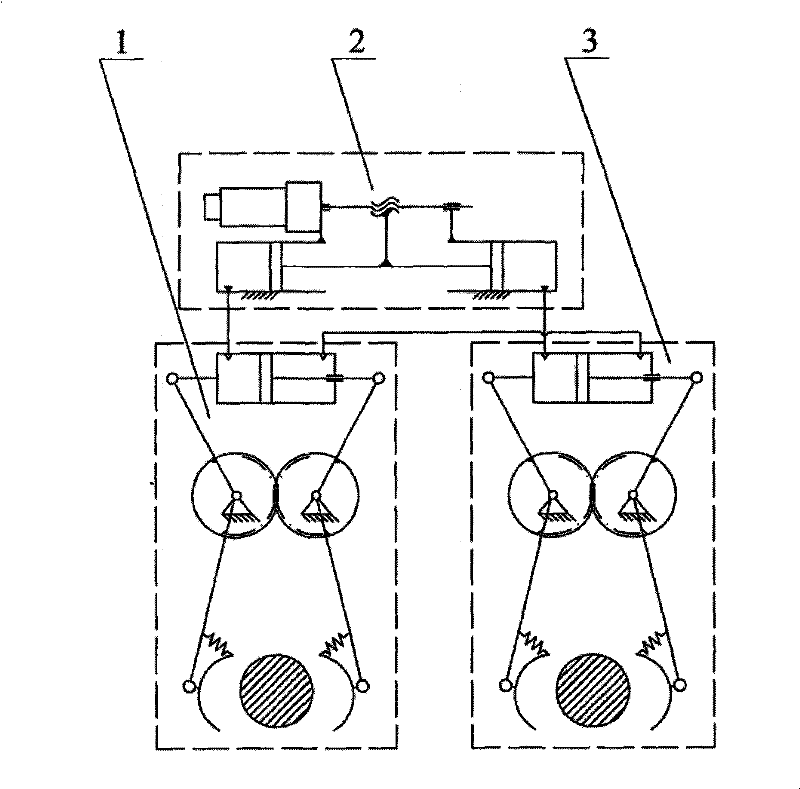
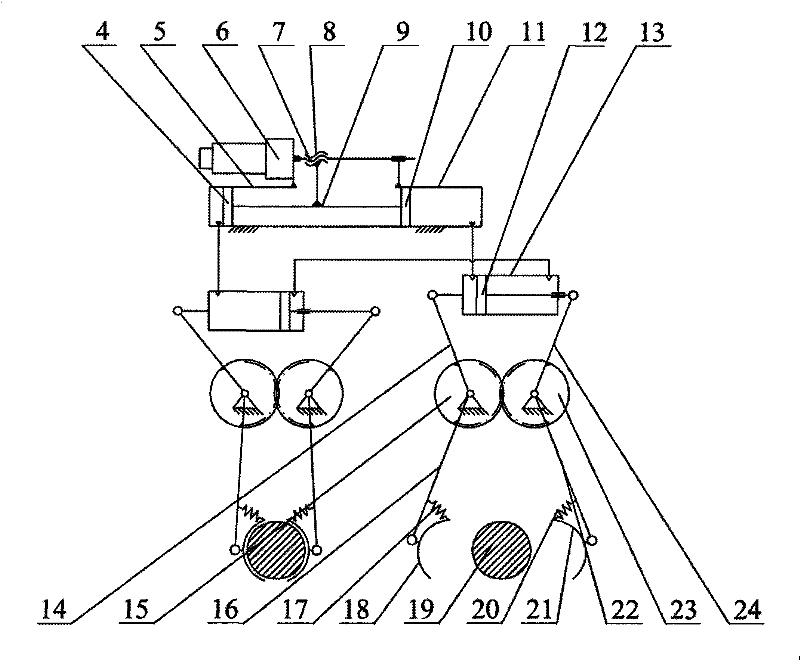
[0023] figure 1 Structural schematic diagram of Embodiment 1 of the clamping mechanism of the overhead cable climbing robot of the present invention; figure 2 It is a schematic diagram of the structure when the left clamping mechanism is clamped and the right clamping mechanism is released according to Embodiment 1 of the present invention.
[0024] Such as figure 1 , 2 As shown, the clamping mechanism of the aerial cable climbing robot of the present invention includes a left clamping mechanism 1 , a power generating device 2 and a right clamping mechanism 3 . Wherein: the power generating device 2 includes a servo motor assembly 6, a lead screw 7, a screw nut 8, a push rod 9, a left power hydraulic cylinder 5, a left piston 4, a right power hydraulic cylinder 11, and a right piston 10. Wherein: the output shaft of the servo motor assembly 6 is connected with the lead screw 7, and the screw nut 8 moves on the lead screw 7 to cooperate with the lead screw 7. Screw nut 8 i...
Embodiment 2
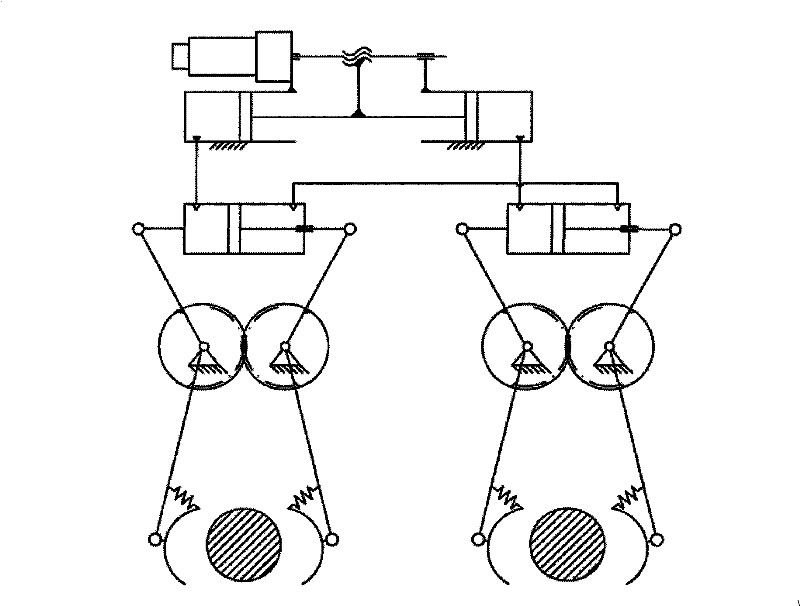
[0031] Figure 6 It is a structural schematic diagram of Embodiment 2 of the present invention, such as Figure 6As shown, the overall structure of this embodiment is the same as that of Embodiment 1, the difference is that the power generating device 2' of this embodiment is a combination of a servo motor assembly and a bidirectional quantitative pump, the output shaft of the servo motor assembly is connected to a bidirectional quantitative pump, and the bidirectional quantitative The two outlets of the pump are respectively connected to the non-push rod chambers of the drive hydraulic cylinders of the left and right clamping mechanisms. The rotation of the servo motor is converted into the flow of hydraulic oil through a two-way quantitative pump, thereby driving the clamping mechanism to complete the clamping and releasing actions, and its working principle is the same as that of Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More