

Photic driving robot and method for driving the robot
A robot and light-driven technology, applied in the direction of manipulators, chucks, joints, etc., can solve problems such as the inability to use robots to perform work, the inability to supply power, and the narrow space, etc., to achieve simple actuators and operating mechanisms, simplified design, and reduced size Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
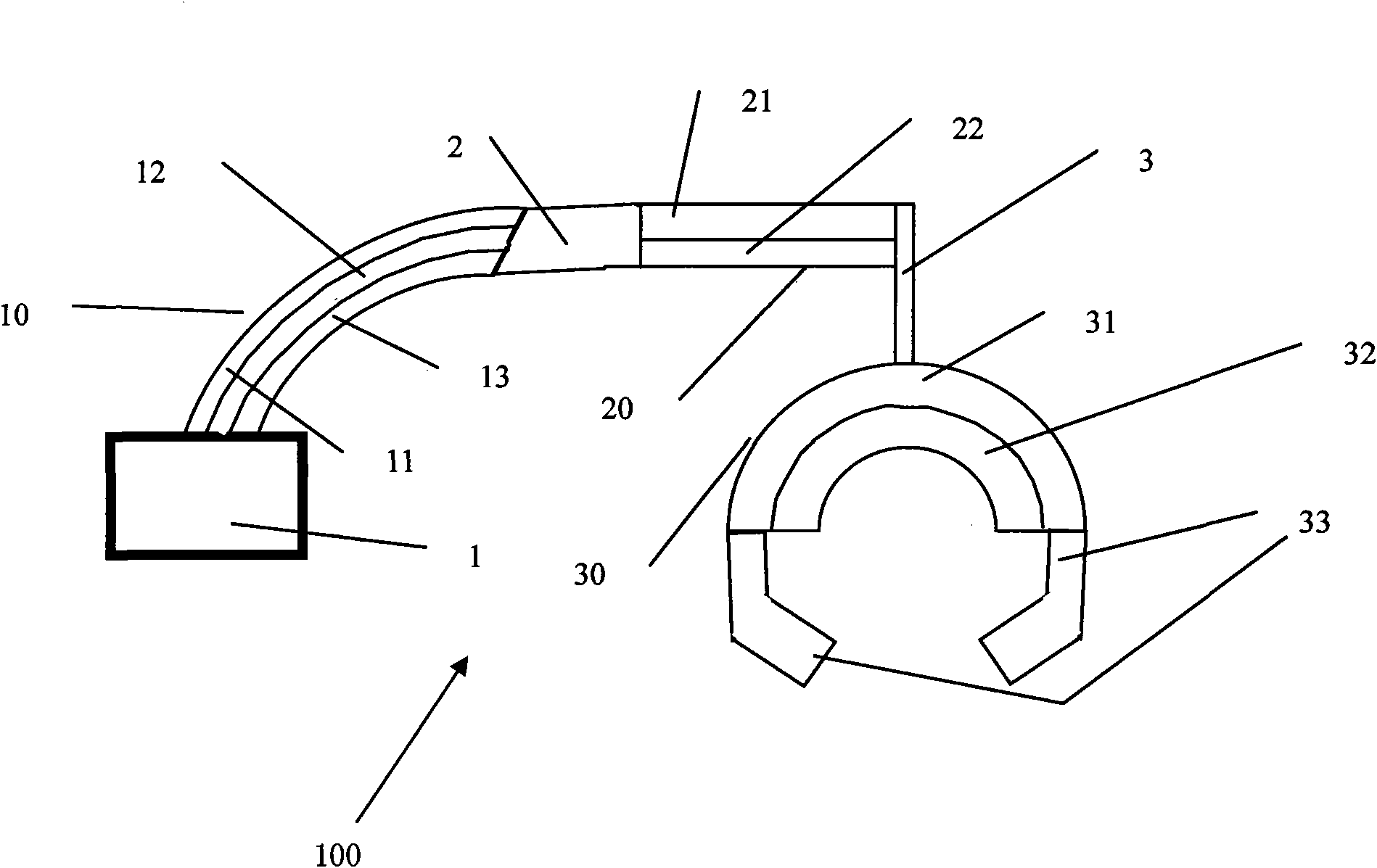
[0038] please see figure 1 As shown, a light-driven robot at least includes a base 1, the base 1 is provided with an arm 100, the tail end of the arm 100 is fixed on the base 1, the arm 100 includes a moving unit 10, a rotating unit 20, a grasping unit 30 , the moving unit 10 and the rotating unit 20 are connected through a fixed joint 2 , and the rotating unit 20 and the grasping unit 30 are connected through a flexible joint 3 . The mobile unit 10 is composed of three layers, the upper layer 11 of the mobile unit and the lower layer 13 of the mobile unit are respectively made of photodeformable materials, which are specifically selected from the materials prepared by specific implementation methods in the patent CN 101225137A, and the middle layer 12 of the mobile unit is made of flexible Composed of polymer materials, uniaxially stretched low-density polyethylene film is used here, and the layers are bonded by adhesives. The rotating unit 20 is composed of two layers, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More