

Fuzzy controller of biomimetic robotic fish and control method thereof
A fuzzy controller and fuzzy control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of fuzzy swimming direction, no real-time adjustment of control parameters, and inability to meet the needs of precise control, etc., to achieve Effects of improved motion control performance, increased accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Preferred embodiments of the present invention will be described in detail below.
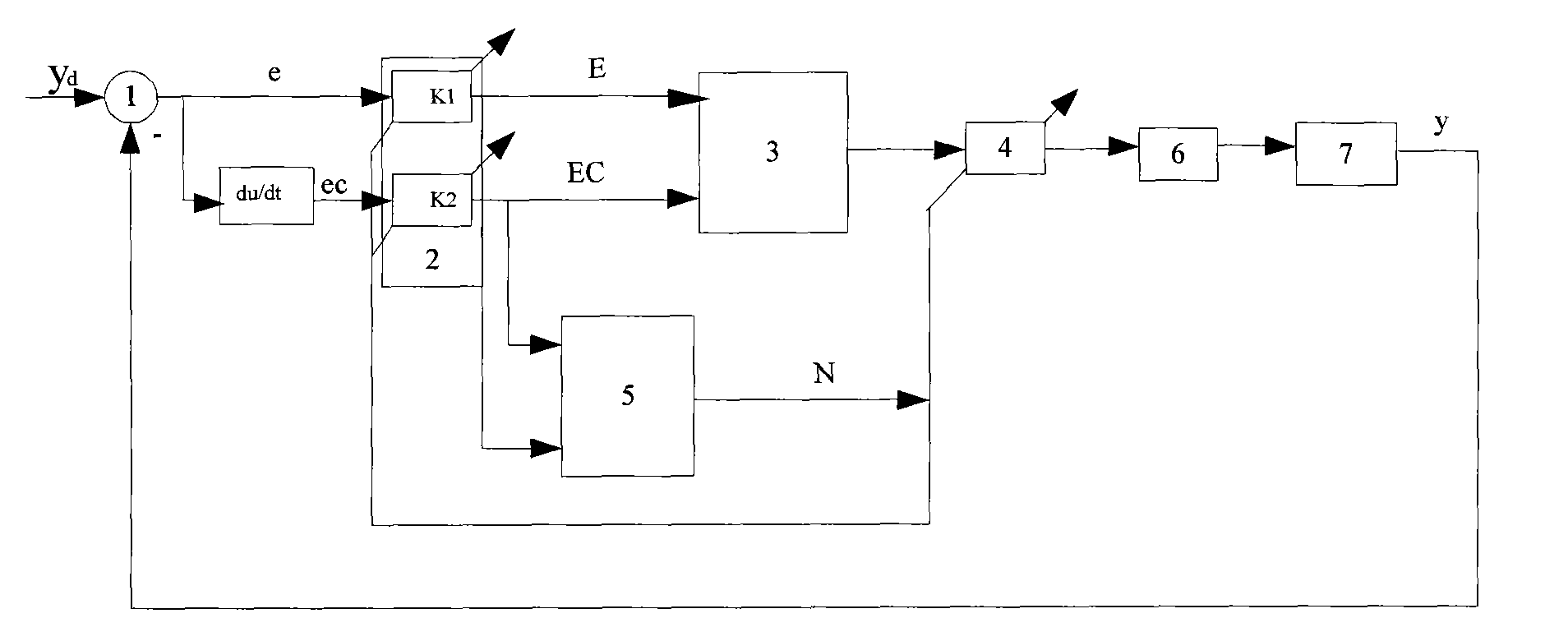
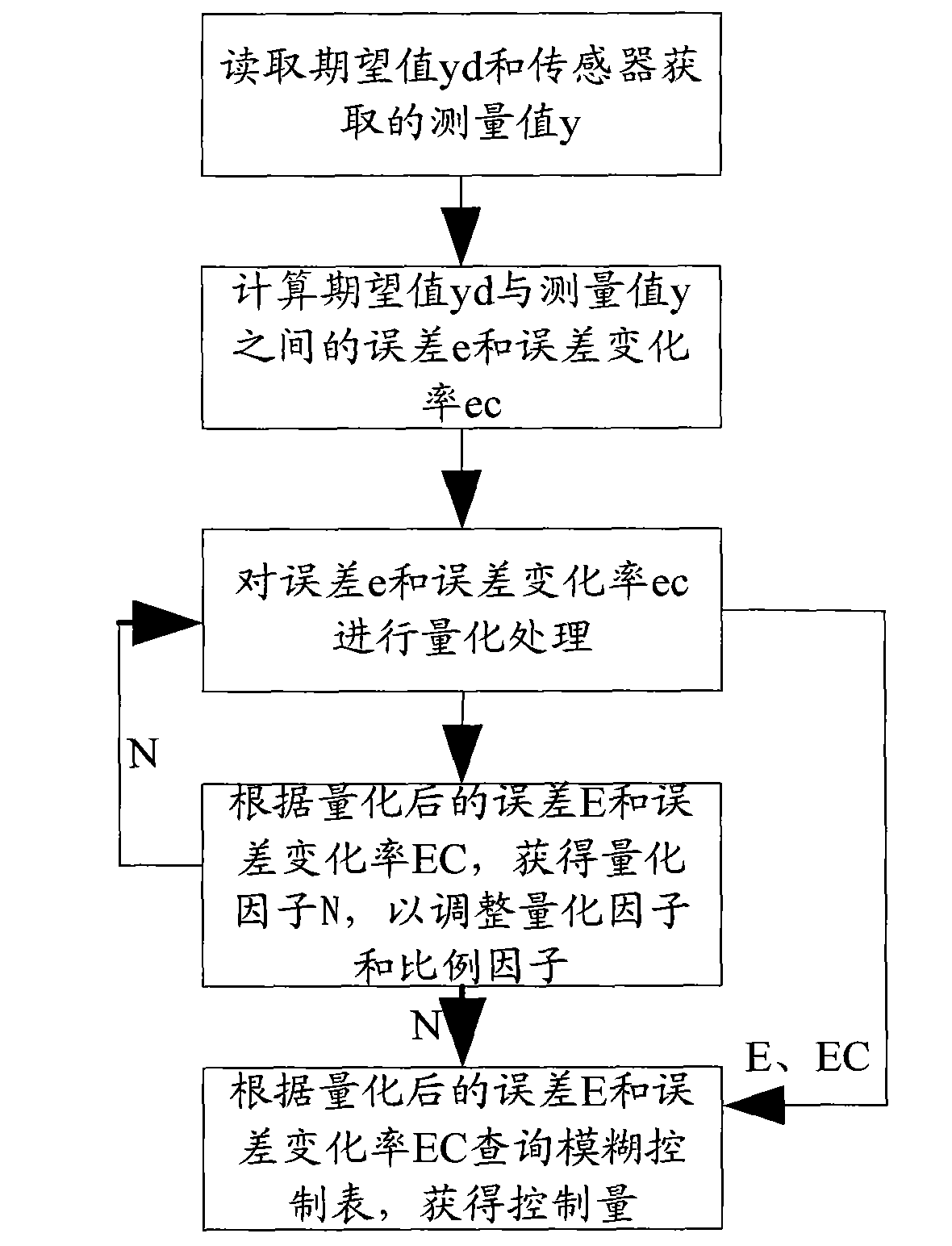
[0032] The bionic robot fish fuzzy controller of the present embodiment is as figure 1 As shown, it includes a receiving module 1, a quantization module 2, a first fuzzy control module 3, an actual control incremental output module 4, a second fuzzy control module 5 and a linear amplifier 6.
[0033] The fuzzy controller of the bionic robotic fish is used for fuzzy control of the motor of the bionic robotic fish. The motor is usually set at the tail of the bionic robotic fish, and the tail of the bionic robotic fish is swung by the motor to perform the movement of the bionic robotic fish. First, the bionic robotic fish is established The kinematics model of the fish; analyze the relationship between the swing frequency, amplitude and phase difference of the bionic robot fish and the motion of the bionic robot fish; establish a fuzzy control table between the fish tail swing and the robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More