Fault determination method based on redundancy inertial measurement information
An inertial measurement and fault judgment technology, applied in the field of inertial navigation systems, can solve problems such as failure diagnosis without detailed introduction, waste of resources, and difficulty in identifying fault forms. changing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0019] In the case where there are N channels (N≥3) of independent measurement information for the same physical quantity, the present invention performs fault discrimination according to the measurement information, and can simultaneously or sequentially identify (N-2) degree faults.
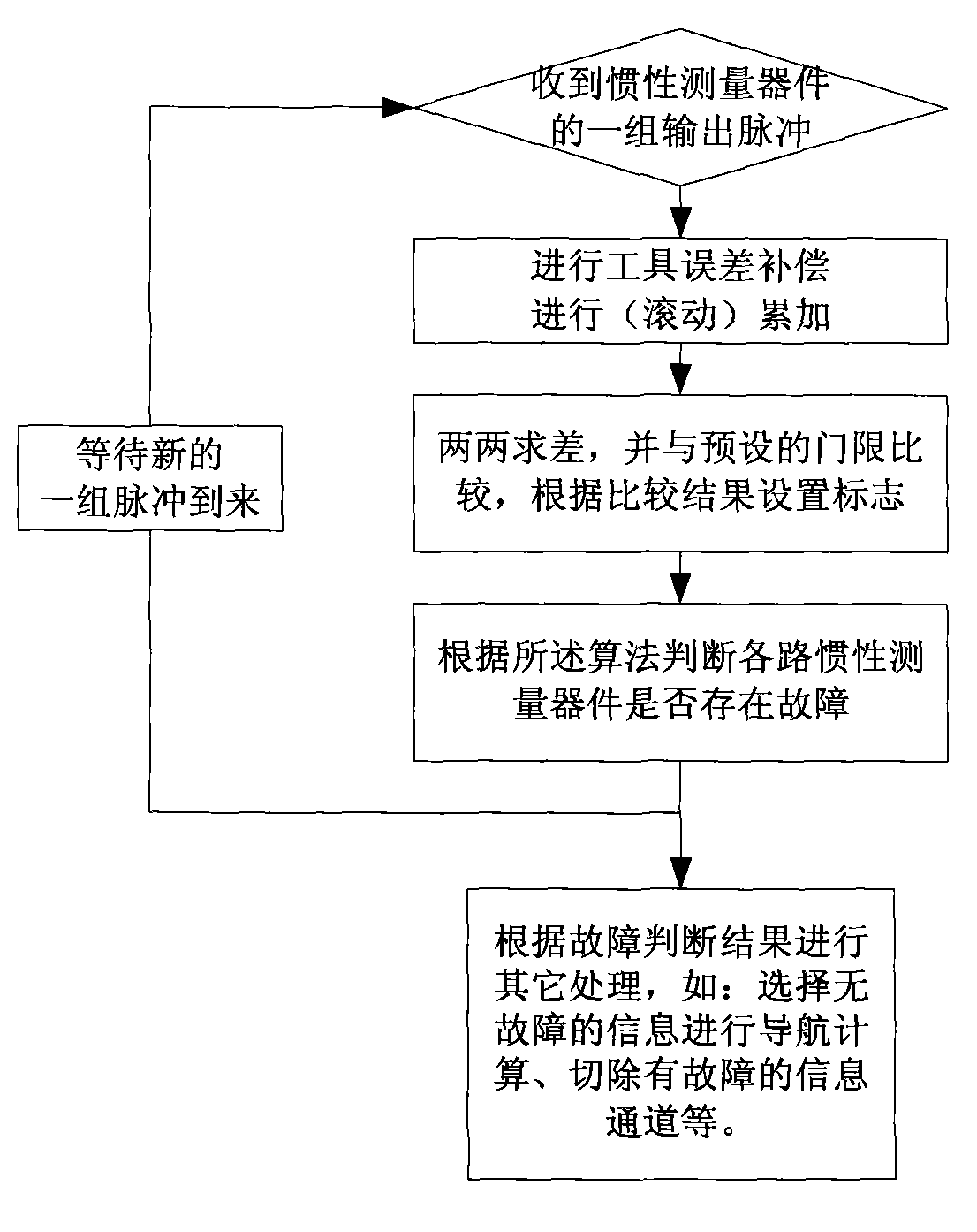
[0020] Taking four redundant information (N=4) as an example below, the present invention is described in detail, as figure 1 As shown, the steps are as follows:
[0021] (1) Convert the pulses output by the current period of the 4-way inertial measurement device into 4-way physical quantity information Tx1, Tx2, Tx3, Tx4;
[0022] When the inertial measurement device is a gyroscope, the converted physical quantity information is angular increment information; when the inertial measurement device is an accelerometer, the physical quantity information is apparent velocity increment.
[0023] According to the characteristics of different inertial measurement devices, tool error compensation can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



