

Method for designing self-adaptive PID controller based on inverse dynamics model
A technology of inverse dynamics and design method, applied in the field of industrial process automatic control, can solve the problems of poor robustness of the control system, affecting the application effect of the control system, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
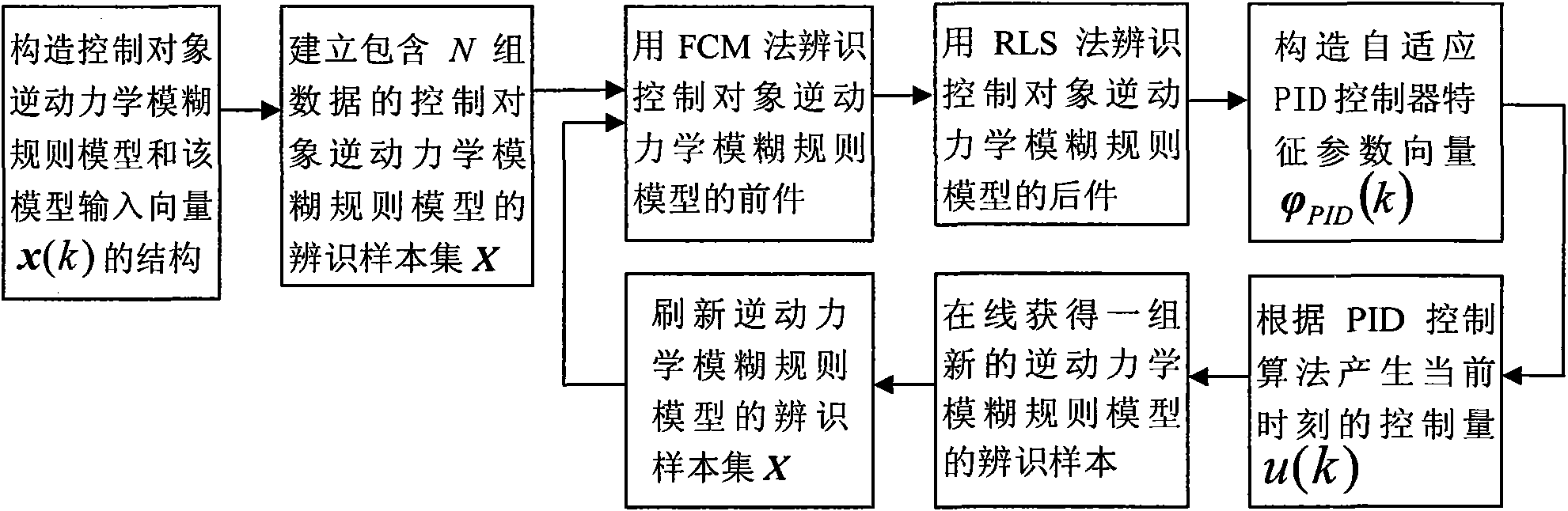
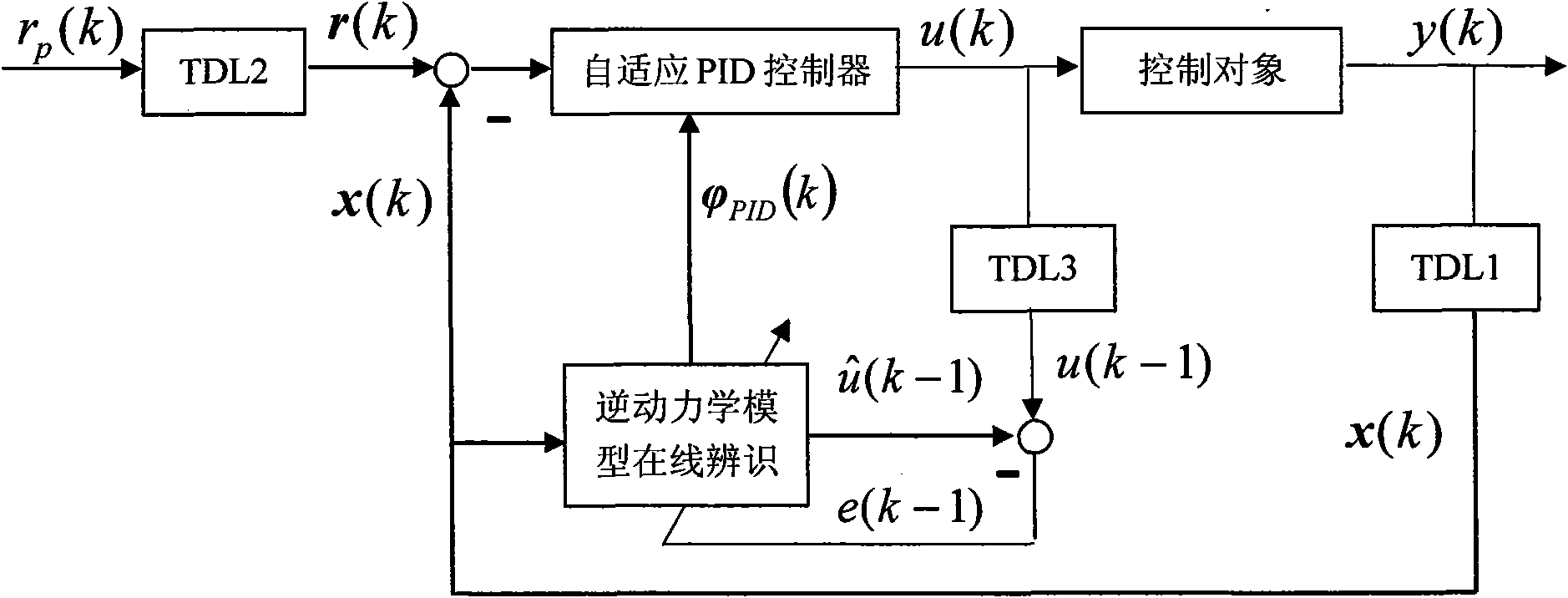
[0035] A design method of adaptive PID controller based on inverse dynamics model (reference figure 1 , figure 2 ), the design method includes the following steps:
[0036] ①Construct the structure of the inverse dynamic fuzzy rule model of the control object, and the structure of the input vector of the inverse dynamic fuzzy rule model of the control object corresponding to the PID controller; establish the identification sample of the inverse dynamic fuzzy rule model of the control object containing N sets of data set X;
[0037] The control object inverse dynamics fuzzy rule model includes c fuzzy rules, of which the i-th fuzzy rule R i for:
[0038] R i : ifx ( k ) is [ x ‾ i , μ i ( k ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More