

Robot walking outside pipeline
A walking robot and pipeline technology, applied in the field of robotics, can solve the problems of difficulty in movement and control, difficulty in popularization and application, and high processing costs, and achieve the effects of simple structure, high walking efficiency, and low processing and manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
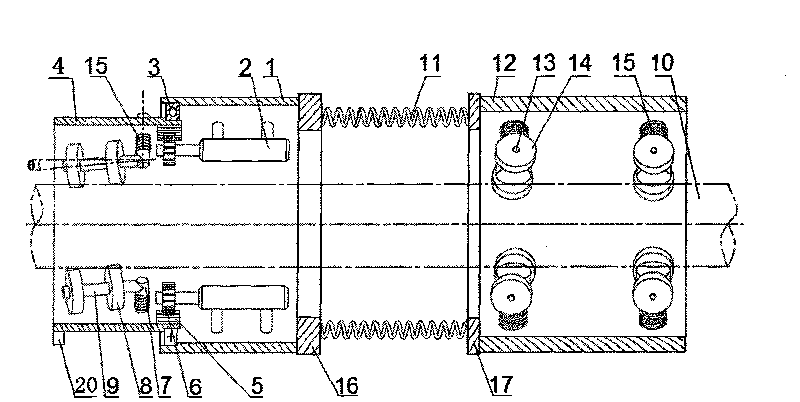
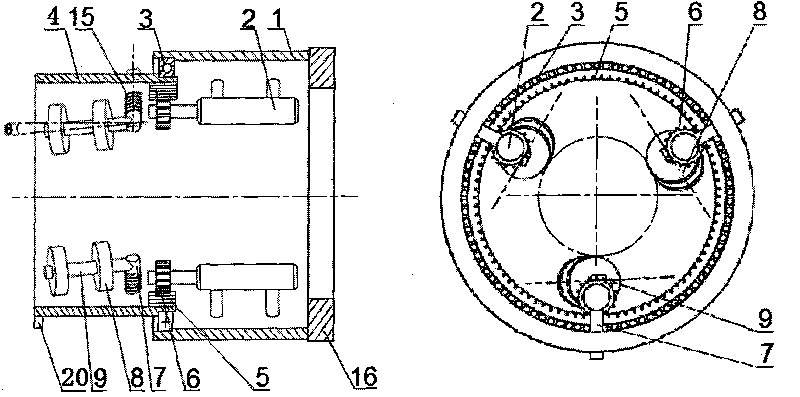
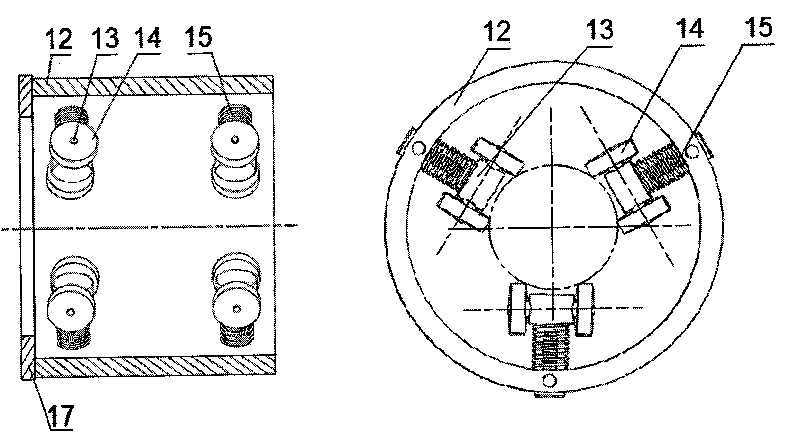
[0014] As an embodiment of the present invention, such as Figure 1 As shown, it is made up of power drive unit, walking guide and six connecting turning springs 11 that connect these two parts. The power drive device consists of a cylindrical body 1 and a cylindrical driving body 4 through a rolling bearing 3 that is not separated from the inner and outer rings to form a rotating body that can be used for relative rotation, and two motors 2 are installed on the inner wall of the cylindrical body 1. The motor shaft and the cylindrical body The axis of 1 is parallel and a gear 6 is installed; and one end of the inner wall of the cylindrical driving body 4 is fixedly installed with an inner ring gear 5 and meshed with the gear 6, and at least three rotatable ring gears are installed on other circumferential positions of the inner wall. The mounting frame 7, the drive wheel 8 is looped on the transverse shaft 9 of the mounting frame 7, and the rotation axis of the driving wheel 8 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More