

Method for detecting arc faults based on time-frequency characteristics of high-frequency current component
An arc fault, high-frequency component technology, applied in voltage/current isolation, measurement using digital measurement technology, spectrum analysis/Fourier analysis, etc. The effect of strong interference ability, reduction of misoperation rate, and wide linearity range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] specific implementation plan
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
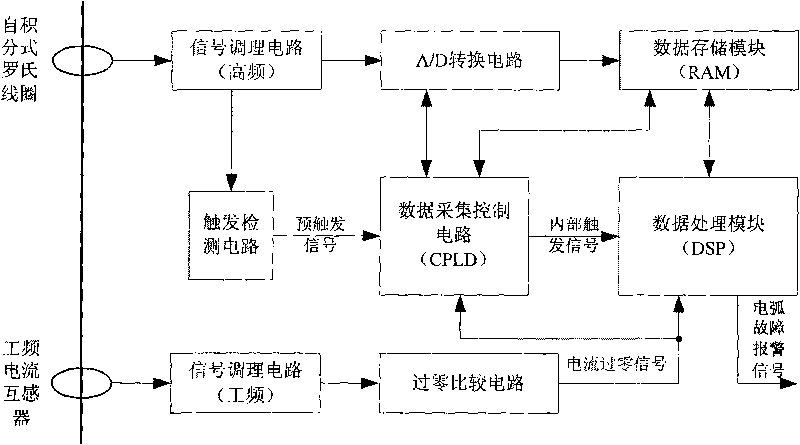
[0027] see figure 1 , The overall structure of the system hardware of the present invention includes a self-integrating Rogowski coil, a signal conditioning circuit (high frequency), an A / D conversion circuit, a trigger detection circuit, a power frequency current transformer, a signal conditioning circuit (power frequency), and a zero-crossing comparison circuit , data acquisition control circuit, data storage module and data processing module.
[0028] The high-frequency signal output by the Rogowski coil is processed by the signal conditioning circuit (high frequency) and the trigger detection circuit to generate a pre-trigger signal, which is sent to the data acquisition control circuit to start the high-frequency signal acquisition; in the control of the data acquisition control module Next, the conditioned signal is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More