

Self-calibration method for binocular stereo vision device
A binocular stereo vision and self-calibration technology, which is applied in the field of computer vision, can solve the problems that the properties of the absolute dual quadric surface cannot be guaranteed, and the self-calibration technology of the camera cannot meet the requirements of the self-calibration of the binocular stereo vision device. sticky effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0043] A specific example is as follows:
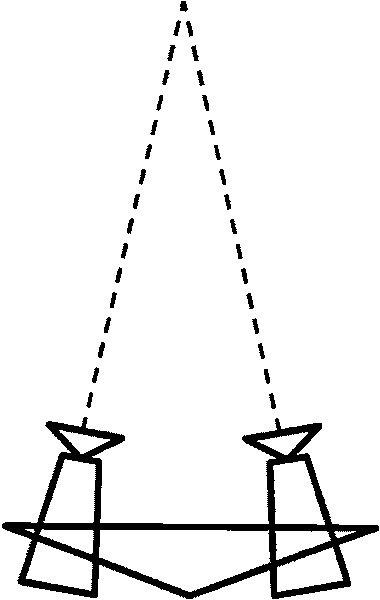
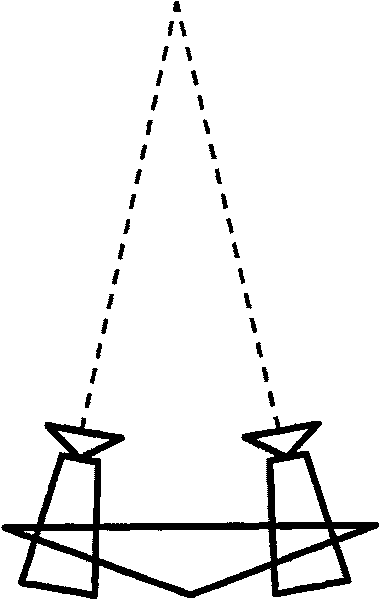
[0044] In this embodiment, the two cameras of the binocular stereo vision device are arranged in a confluence, such as figure 1 As shown, a detailed description of its implementation steps:
[0045] 1) Matching between images based on feature points.
[0046] 11) Use the SIFT algorithm to detect image feature points in the two views, and obtain 128-dimensional feature point descriptors of the feature points. The SIFT feature point detection algorithm can accurately and stably detect the feature points in the image. The stability and precision of the self-calibration technology can be effectively guaranteed.
[0047] 12) Match the feature points in the two views according to the obtained 128-dimensional feature point descriptor. The specific matching method is as follows: the two feature points with the shortest Euclidean distance between descriptors in the two images are considered as matching points.
[0048] 13) According to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More