

Movement control servo loop device
A technology of motion control and motion position, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problem of slowing down the response speed, failing to respond to the system, correcting steady-state error control performance, affecting the tracking accuracy of the control system, and Trajectory accuracy and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical means and effects used by the present invention to achieve the technical purpose will be described below with reference to the accompanying drawings. The embodiments listed in the accompanying drawings are only for auxiliary illustration, but the technical means of the present invention are not limited to the listed appended drawings. picture.
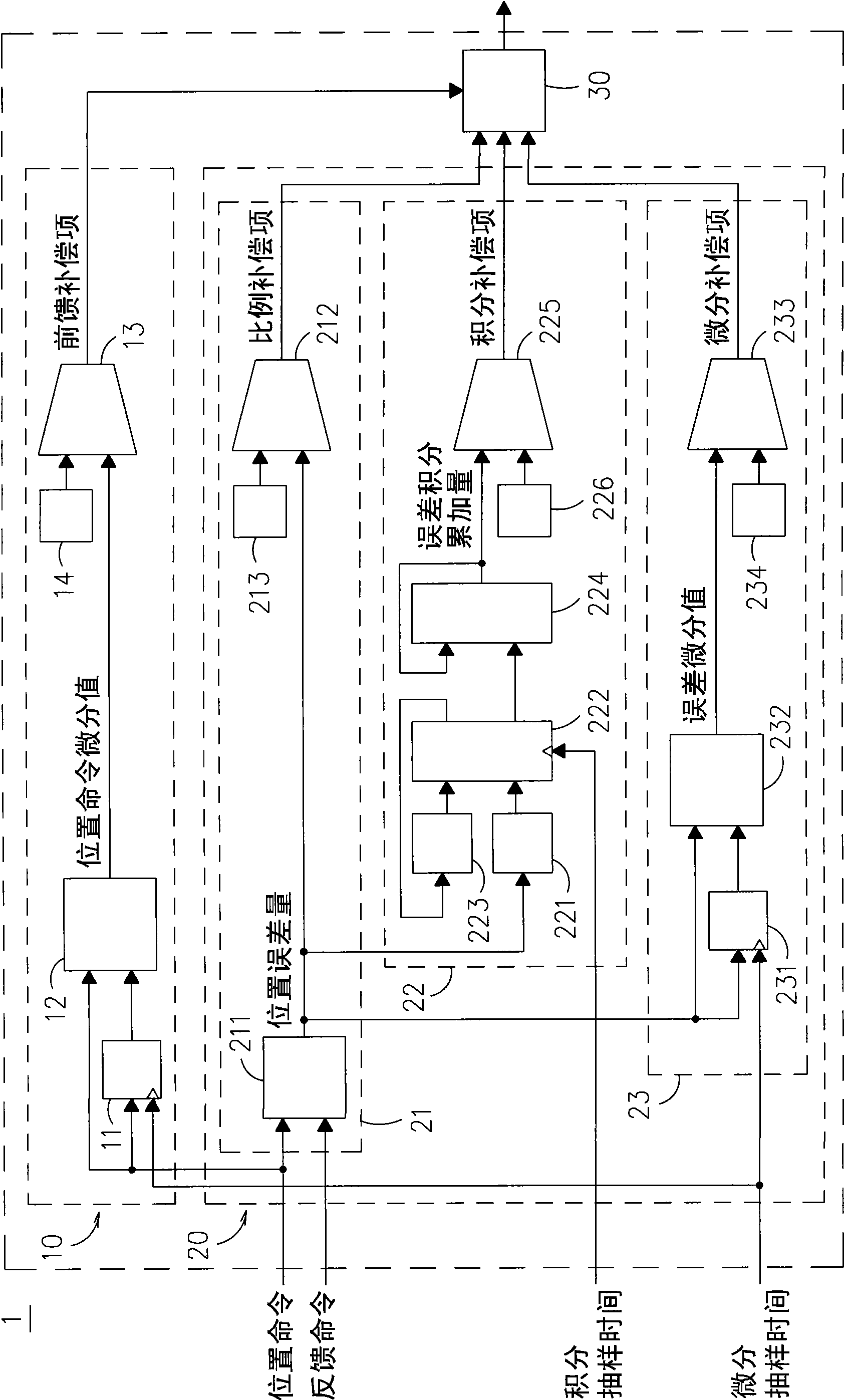
[0038] see figure 1 As shown, the structure diagram of the motion control service loop device provided by the present invention, the motion control service loop device mainly includes a feedforward control module 10, a proportional-integral-derivative (PID, Proportional-Integral-Derivative) control loop 20 and a compensation item adder 30 .
[0039] The feedforward control module 10 performs a differential operation on a position command through a temporary register 11 and a subtractor 12, and generates a position command differential, and then passes the position command differential through a multiplier 13 and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More