

Scene modeling method under single camera and system
A single-camera, scene modeling technology, applied in the field of scene modeling, can solve problems such as inability to adapt to scene changes, inconspicuous dot matrix imaging, and unoptimized image coordinates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0065] Embodiment 1, a scene automatic modeling system under a single camera, such as figure 1 shown, including:
[0066] The moving object detection subsystem is used to detect moving objects from the video frame images captured in the current scene;
[0067] A moving object tracking subsystem, configured to track the detected moving object, and obtain the moving track of the moving object;
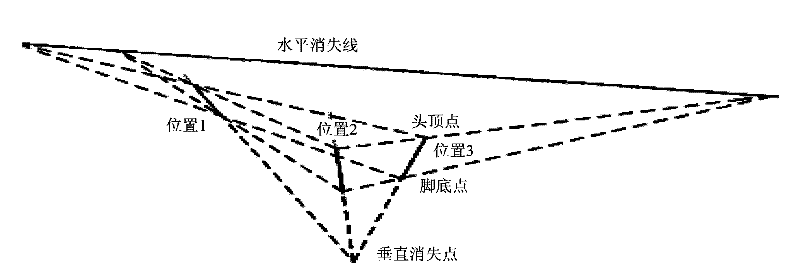
[0068] Determining the calibration target subsystem is used to filter out the calibration target from the motion trajectories of all moving targets. If the screening is successful, the scene modeling subsystem is started; the filtered calibration target refers to a moving target that meets the following conditions: The eigenvalue of the moving target matches the preset eigenvalue, and the moving track of the moving target includes at least three position points, these position points are not collinear, have no overlap, and the distance between each pair is greater than a preset The dis...
Embodiment 2
[0136] Embodiment 2, a scene automatic modeling method under a single camera, comprising:
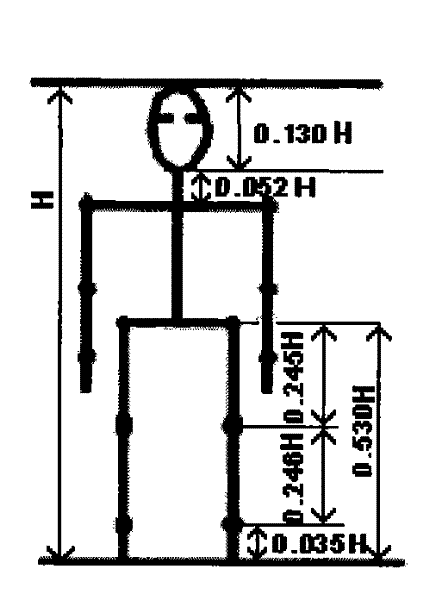
[0137] First, detect and track the moving objects entering the scene, and record their trajectories in the scene; analyze these trajectories, and select the best target that meets the conditions as the calibration object. If the selection of the calibration object is unsuccessful, then Continue to process the next frame, otherwise enter the modeling stage; when modeling, it is necessary to determine the most evenly distributed positions in the trajectory of the calibration object, extract the image coordinates of the head and foot points of the calibration object at these positions, and combine projection and The knowledge of geometry can establish scene modeling.
[0138] The method is as Figure 5 As shown, it specifically includes the following steps:
[0139] A. According to the video frame image captured in the current scene, the moving target is detected;
[0140] B. Track each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More