

Method for controlling movement of woundless rat robot
A technology of robot movement, mouse, used in the direction of animal taming device, application, animal husbandry
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
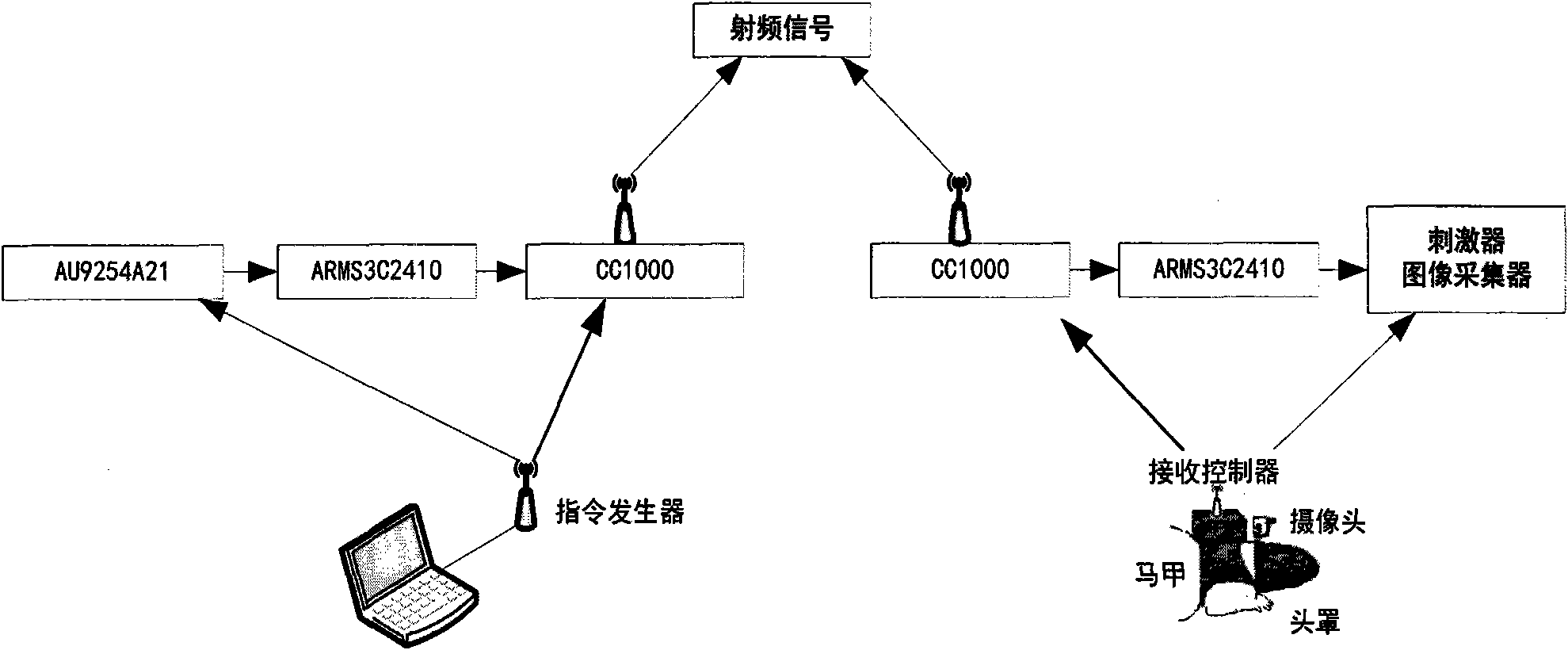
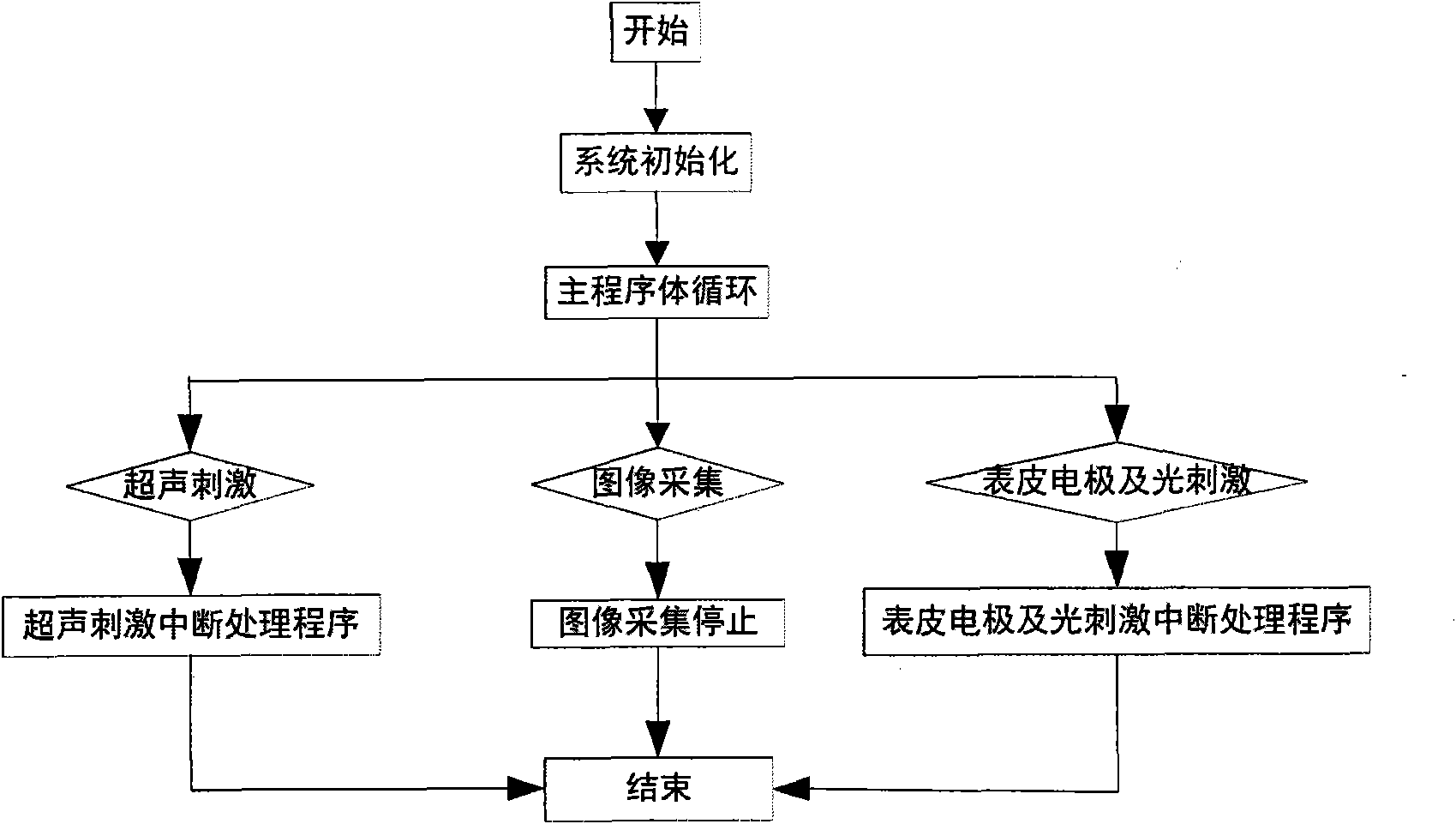
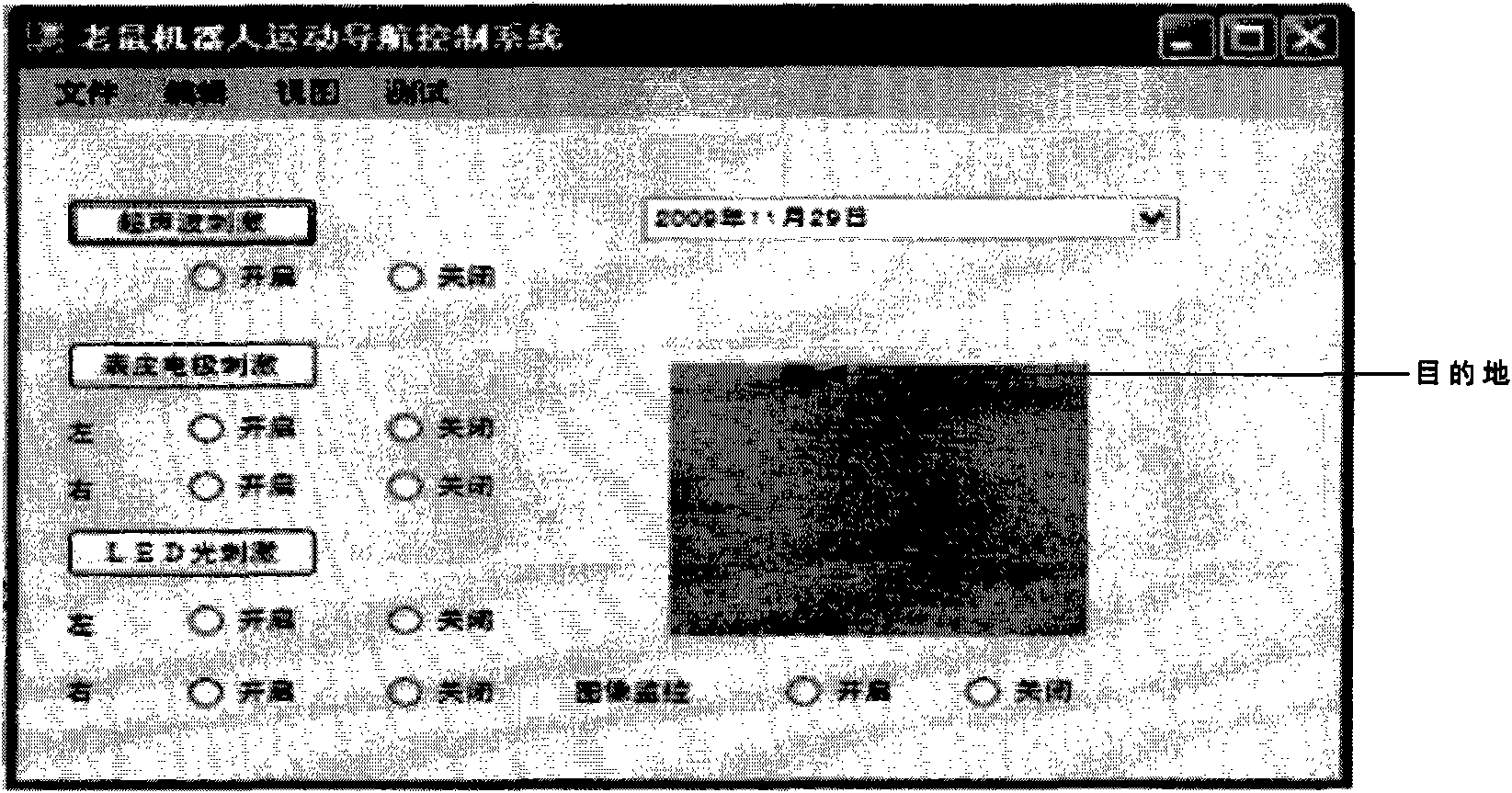
[0020] The invention provides a method of ultrasonic stimulation combined with epidermal electrode stimulation and LED light-assisted stimulation to realize the movement control of non-invasive mice. Ultrasound generally refers to signals with a frequency higher than 2Khz. Studies have shown that mice communicate with ultrasonic waves and are very sensitive to ultrasonic waves. They can judge the source of sound in the dark, and they will feel uncomfortable when stimulated by powerful high-power ultrasonic pulses. The specific performance is that they run around aimlessly. Based on this, a hood is designed for the mouse to shield the mouse from the surrounding environment, including vision, hearing and taste. When the mouse wears the hood, the mouse's vision, hearing and taste are shielded, and the mouse is uncertain about the surrounding environment, so it remains in a static state, and the ultrasonic stimulator is placed in the hood. At this time, the mouse is stimulated wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More