Quick automatic artillery aiming device
An automatic aiming and artillery technology, applied in the direction of aiming devices, weapon accessories, offensive equipment, etc., can solve problems such as coarse alignment and fine alignment, and achieve the effect of reducing work intensity, improving firing efficiency, and improving automation level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings.
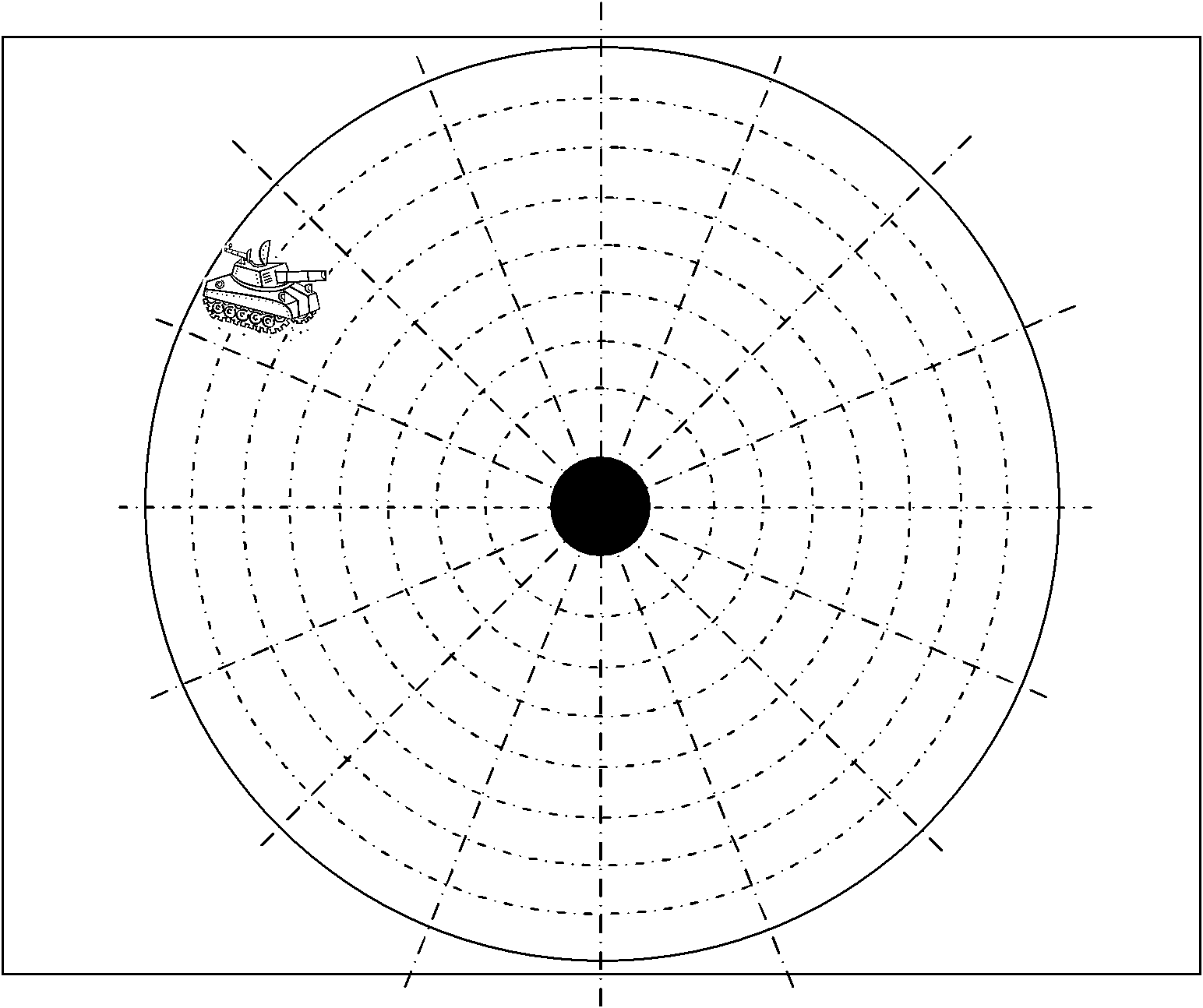
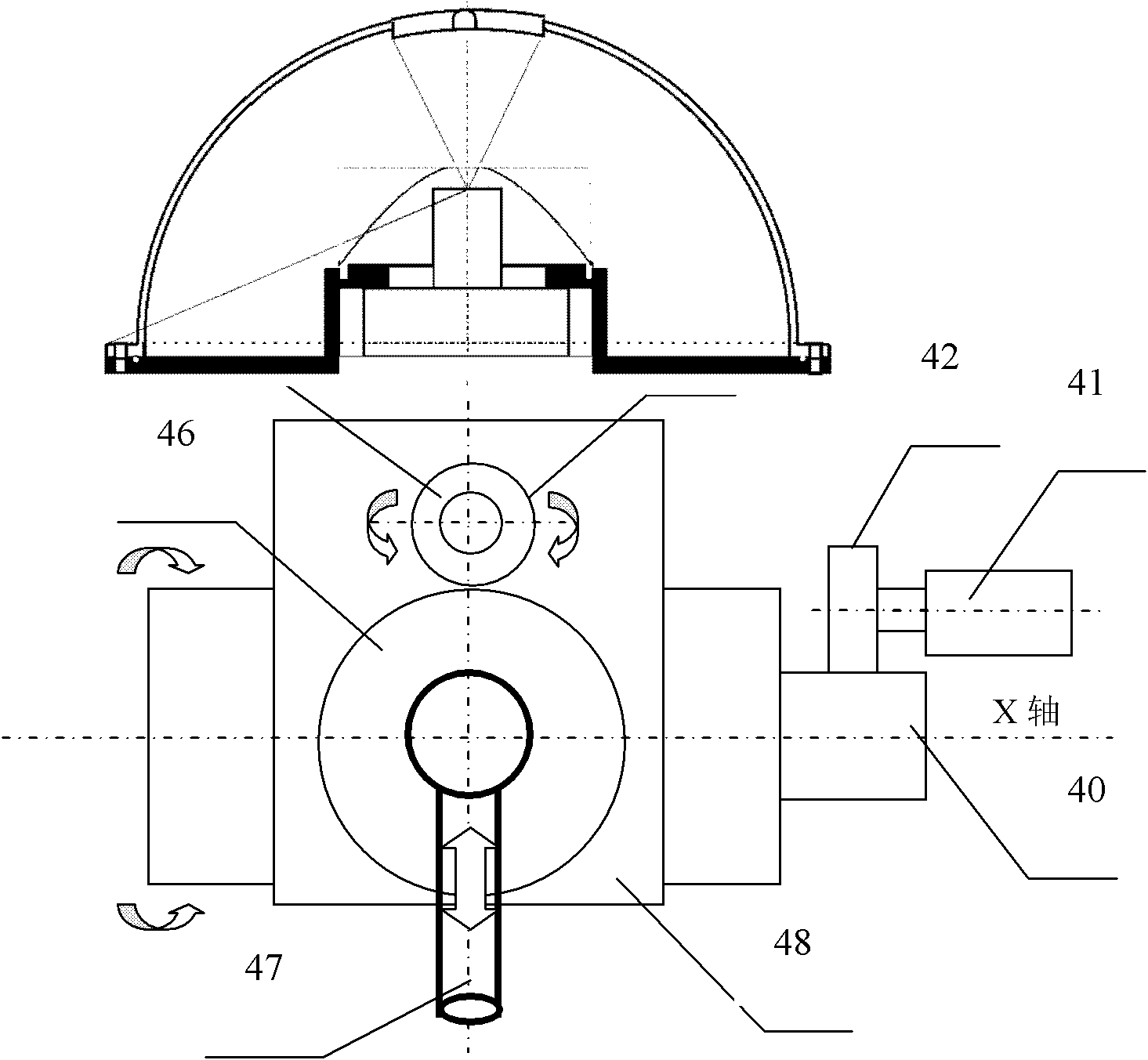
[0033] refer to Figure 1 to Figure 11 , a rapid automatic aiming device for artillery, comprising an omnidirectional vision sensor, an embedded system, a touch display, a periscope aiming drive unit and a periscope aiming mechanism; the omnidirectional vision sensor is used to acquire Panoramic video image, fixed atop the tank's external artillery turret, as Figure 6 As shown; the embedded system is used to read the panoramic video image obtained from the omni-directional vision sensor and the partial video image of the attack target obtained from the periscope aiming mechanical device, for obtaining The control signal of the touch screen is used to control the periscope aiming drive unit, and the embedded system is configured inside the tank near the periscope aiming drive unit; the The touch screen is used to display the panoramic video image around the tank and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com