

Adaptive tracking control method of paths of comprehensive automatic guided vehicle
An automatic guided vehicle and adaptive tracking technology, applied in attitude control, vehicle components, non-deflectable wheel steering, etc., can solve the problems of large motion space, high manufacturing cost, and difficulty in accurately controlling the motion state of the driving wheel. The effect of easy maintenance, low manufacturing cost and precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
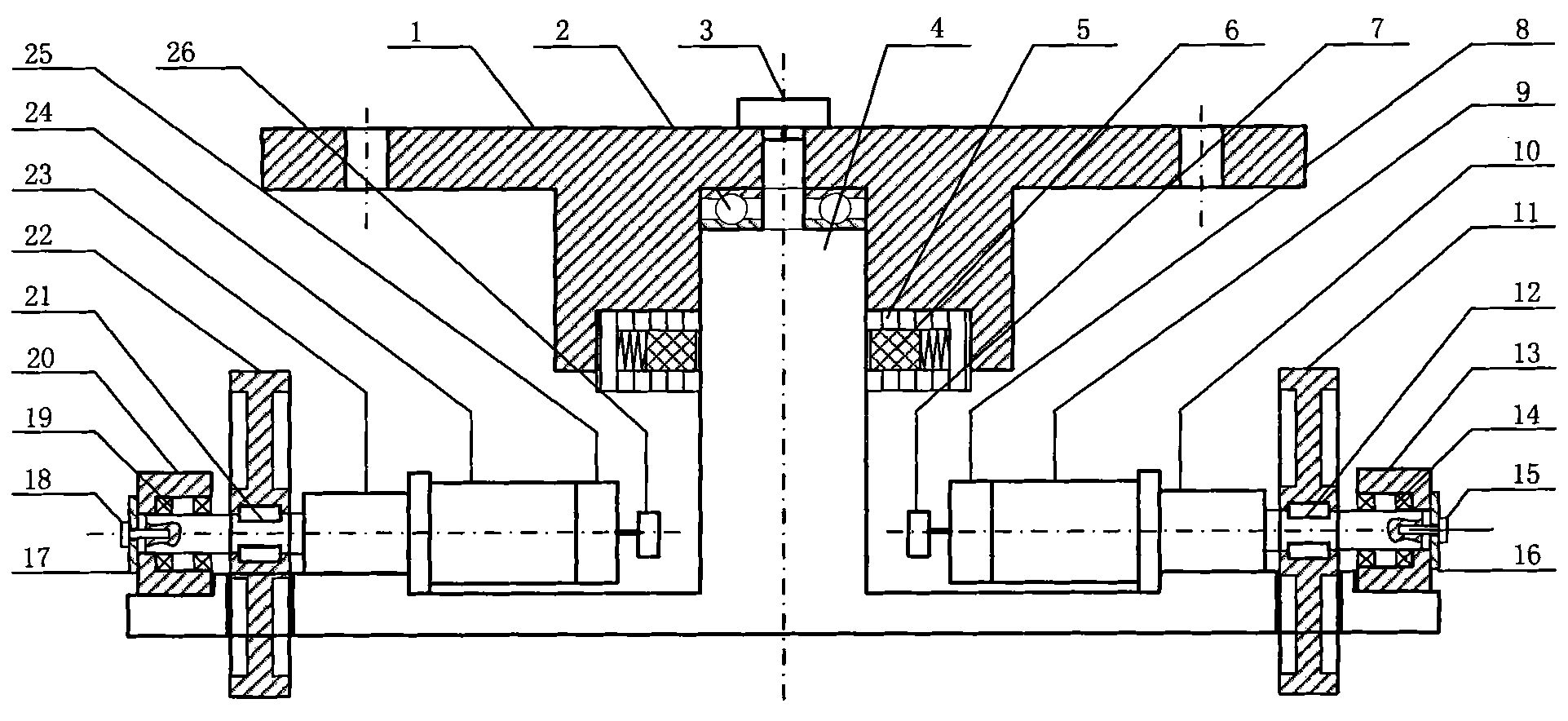
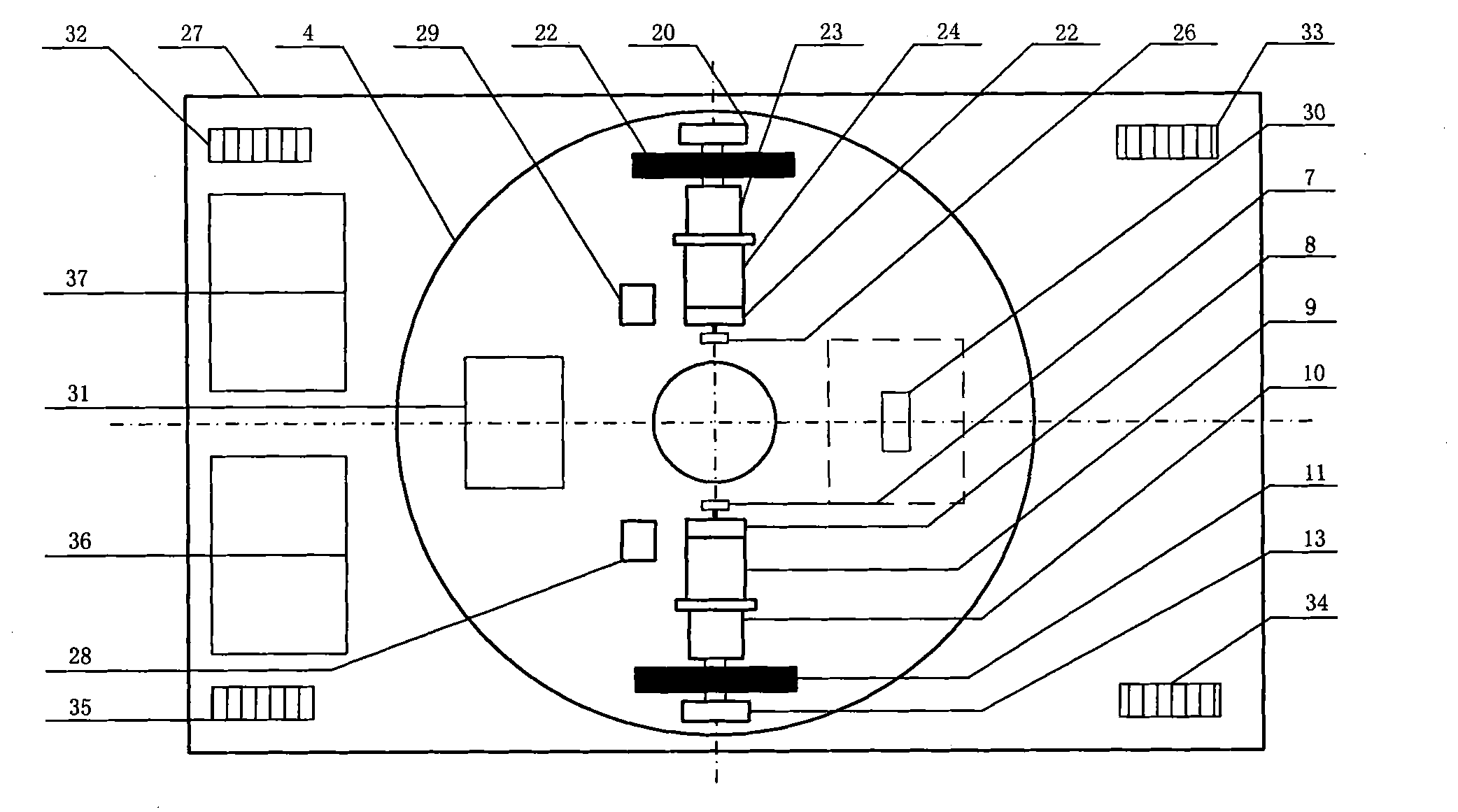
[0057] The composition structure of the separable differential drive device and the operation process of the path adaptive tracking control method of the present invention will be described in detail below according to the embodiments shown in the accompanying drawings.
[0058] refer to figure 1 , the separable differential drive device of the present invention is made of detachable upper turntable 1 and lower turntable 4, wherein the upper turntable 1 has a central hole, and the upper end of the lower turntable 4 has a central shaft; the center hole of the upper turntable 1 It is coaxially assembled with the central shaft of the lower turntable 4 through a thrust bearing 2; while bearing the axial load, it is ensured that the central shaft of the lower turntable 4 can rotate freely in the center hole of the upper turntable 1. A cylindrical electromagnetic clutch 5 is also installed between the central hole of the upper rotating disk 1 and the central axis of the lower rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More