

Approximate target object detecting method and device
A target and feature point detection technology, applied in the field of image processing, can solve problems such as inaccurate detection results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
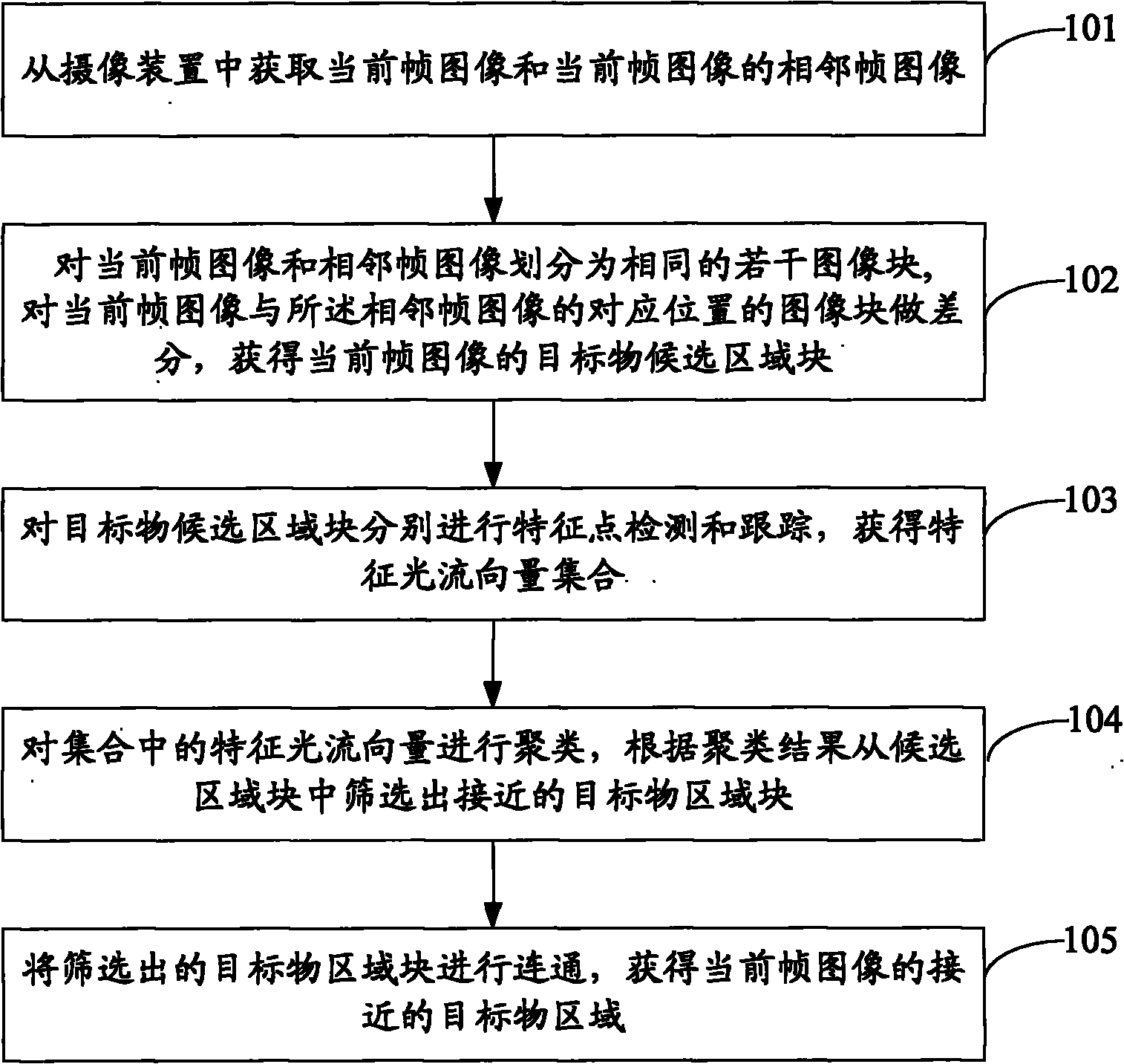
[0065] see figure 1 , which is the flow chart of the first embodiment of the approaching object detection method of the present application:
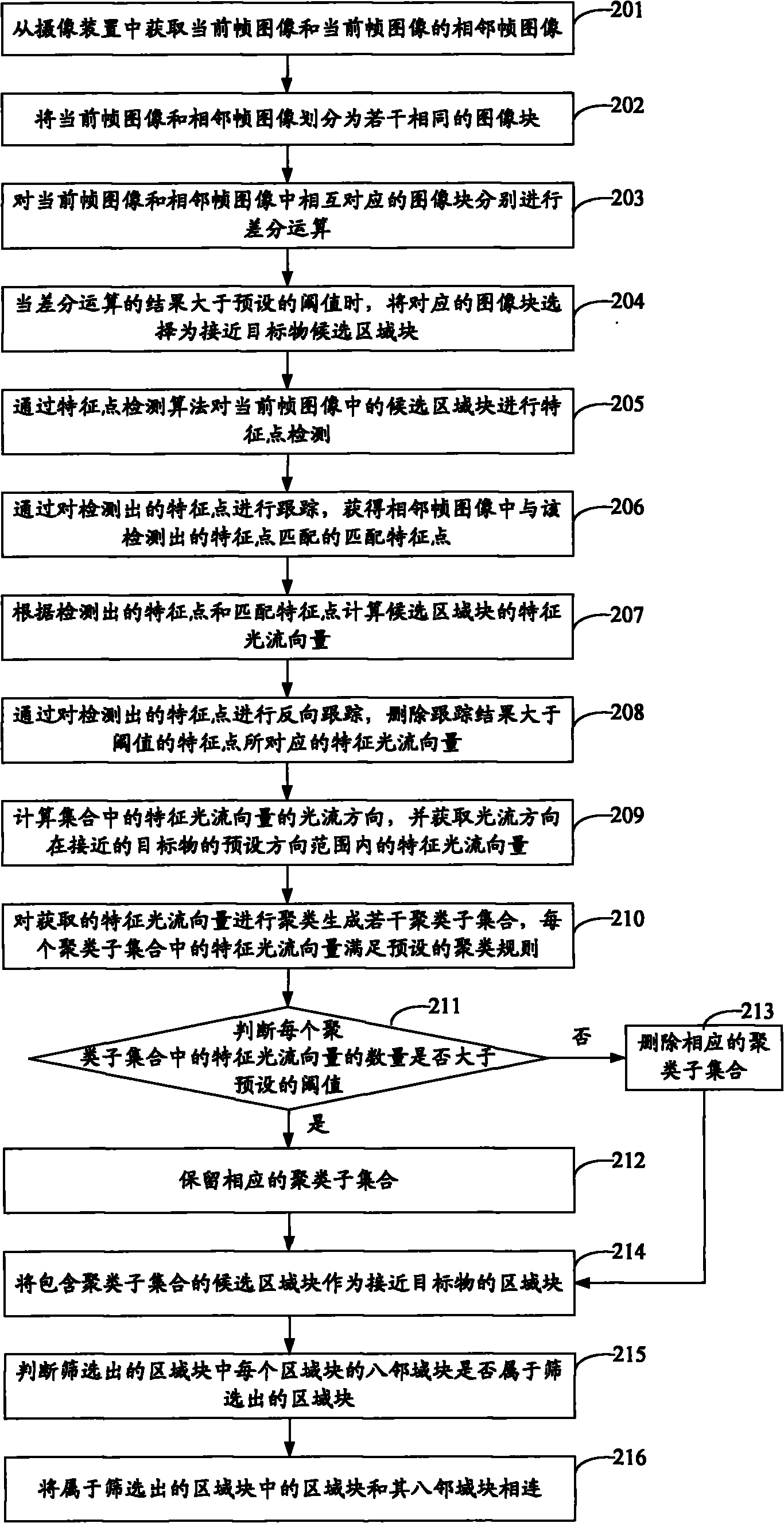
[0066] Step 101: Obtain the current frame image and adjacent frame images of the current frame image from the camera.
[0067] Step 102: Divide the current frame image and the adjacent frame image into the same number of image blocks, make a difference between the current frame image and the image blocks at the corresponding positions of the adjacent frame image, and obtain the target object candidate area block of the current frame image .
[0068] Specifically, the current frame image and the adjacent frame image are divided into several identical image blocks, and the difference operation is respectively performed on the image blocks corresponding to each other in the current frame image and the adjacent frame image, when the difference When the result of the calculation is greater than the preset threshold, the corresponding image...
no. 1 example
[0132] see Figure 5 , which is the block diagram of the first embodiment of the object detection device close to the present application:
[0133] The apparatus for detecting an approaching object includes: an acquisition unit 510 , a difference unit 520 , a detection unit 530 , a clustering unit 540 and a connection unit 550 .
[0134] Wherein, the obtaining unit 510 is configured to obtain the current frame image and the adjacent frame images of the current frame image from the camera device;
[0135] The difference unit 520 is used to divide the current frame image and the adjacent frame image into the same number of image blocks, and make a difference between the image blocks corresponding to the current frame image and the adjacent frame image to obtain the current frame The target object candidate area block of the image;
[0136] A detection unit 530, configured to perform feature point detection and tracking on the target candidate area blocks, to obtain a set of fe...
no. 2 example
[0139] see Figure 6 , which is a block diagram of the second embodiment of the object detection device close to the present application:
[0140] The apparatus for detecting an approaching object includes: an acquisition unit 610 , a difference unit 620 , a detection unit 630 , a tracking unit 640 , a deletion unit 650 , a clustering unit 660 and a connection unit 670 .
[0141] Wherein, the acquisition unit 610 is configured to acquire the current frame image and the adjacent frame images of the current frame image from the camera device;
[0142] The difference unit 620 is used to divide the current frame image and the adjacent frame image into the same number of image blocks, and make a difference between the image blocks corresponding to the current frame image and the adjacent frame image to obtain the current frame The target object candidate area block of the image;
[0143] A detection unit 630, configured to perform feature point detection and tracking on the targe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More