

Control method for eliminating upper body posture shaking of double-foot humanoid robot
A humanoid robot and robot technology, applied in the direction of attitude control, etc., can solve problems such as the algorithm that does not mention the waist joint to eliminate shaking of the upper body, and achieve the effect of eliminating upper body shaking and maintaining dynamic stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
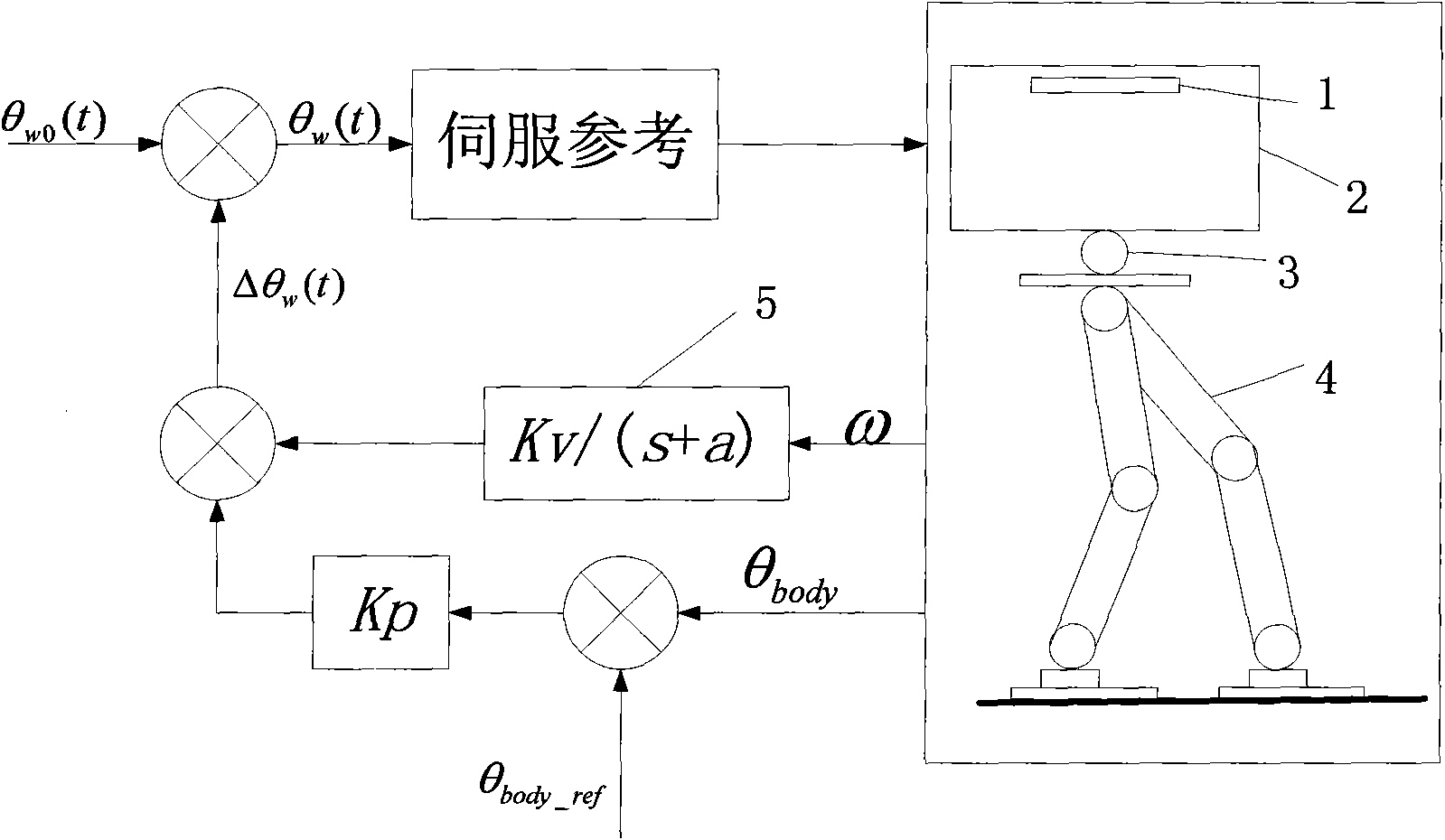
[0036] figure 1 A structural diagram of a robot controller according to the present invention is shown. It consists of offline gait planning θ w0 (t) and Δθ for feedback w (t) Composition. The walking robot includes an attitude sensor 1, an upper body 2, a waist joint 3 (including two degrees of freedom of pitch and roll), a lower body 4 and its connecting parts. The angular velocity value used in the velocity feedback needs to be filtered by the low-pass filter 5 .
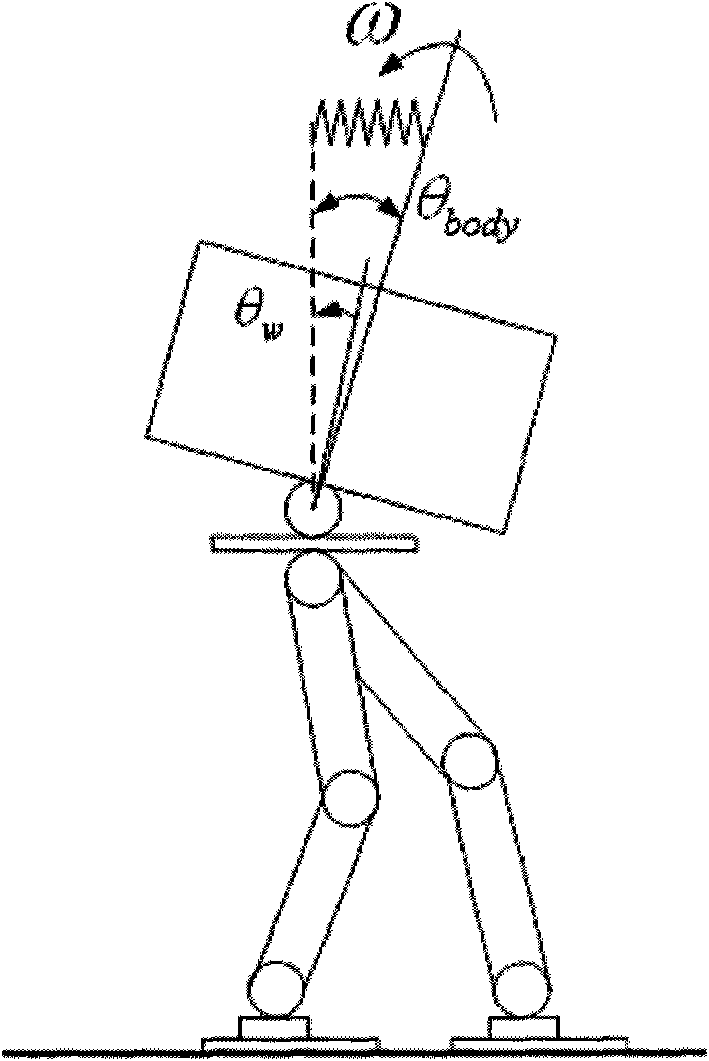
[0037] When the robot is walking or working in real time, the reference angle θ of the robot's waist joint w (t) is equal to the offline planned dynamic gait θ w0 (t) plus the real-time correction amount Δθ w (t). Among them, θ w0 (t) is generally generated given a known robot model and surrounding environment. Δθ w (t) is the real-time correction amount of the waist joint in order to eliminate the shaking when the upper body of the robot shakes.
[0038] After experiments, the upper body of the robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More