

Air-fleet inertial navigation data fusion method based on mutual ranging information
An inertial navigation and data fusion technology, applied in the field of navigation and positioning, can solve problems such as difficulty in working independently for a long time, unavailability, accumulation of navigation and positioning errors, etc., and achieve the effect of easy calculation and strong robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
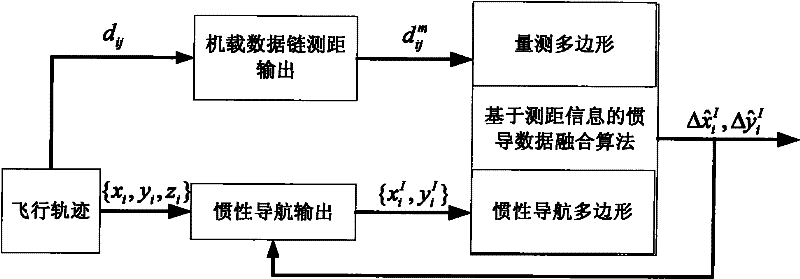
[0017] The present invention first determines the use of the inertial navigation data fusion system based on mutual ranging information, then uses the corresponding inertial navigation data and mutual ranging information to determine the inertial navigation polygon and the measurement polygon, and then compares the inertial navigation polygon to the measurement polygon Perform translation and rotation, and finally estimate the inertial navigation position error. The basic principle is as follows figure 1 As shown, the specific steps are as follows:
[0018] 1. Adopt an inertial navigation data fusion system based on mutual ranging information, such as figure 2 As shown, each network node needs to be equipped with a set of airborne data link, a set of inertial navigation system and a set of networking computer. During the working process, the inertial navigation data is transmitted to the airborne data link, and the transmitted inertial navigation data includes the status wor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More