

Off-line programming system and method of optical visual sensor with linear structure for welding robot
A vision sensor, robot line technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that affect the collaborative development and application of welding robot intelligent technology, and the difficulty of robot offline programming technology to take advantage of the advantages, to achieve the effect of expanding the scope
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing and specific embodiment the present invention is further described:
[0043]This example adopts solidworks running on the operating system based on PC and Windows as the software development platform, in which the simulation scene is established in the solidworks assembly space (corresponding to *.sldasm file), and each solid model is also a 3D entity in solidworks (corresponding to *.sldprt).
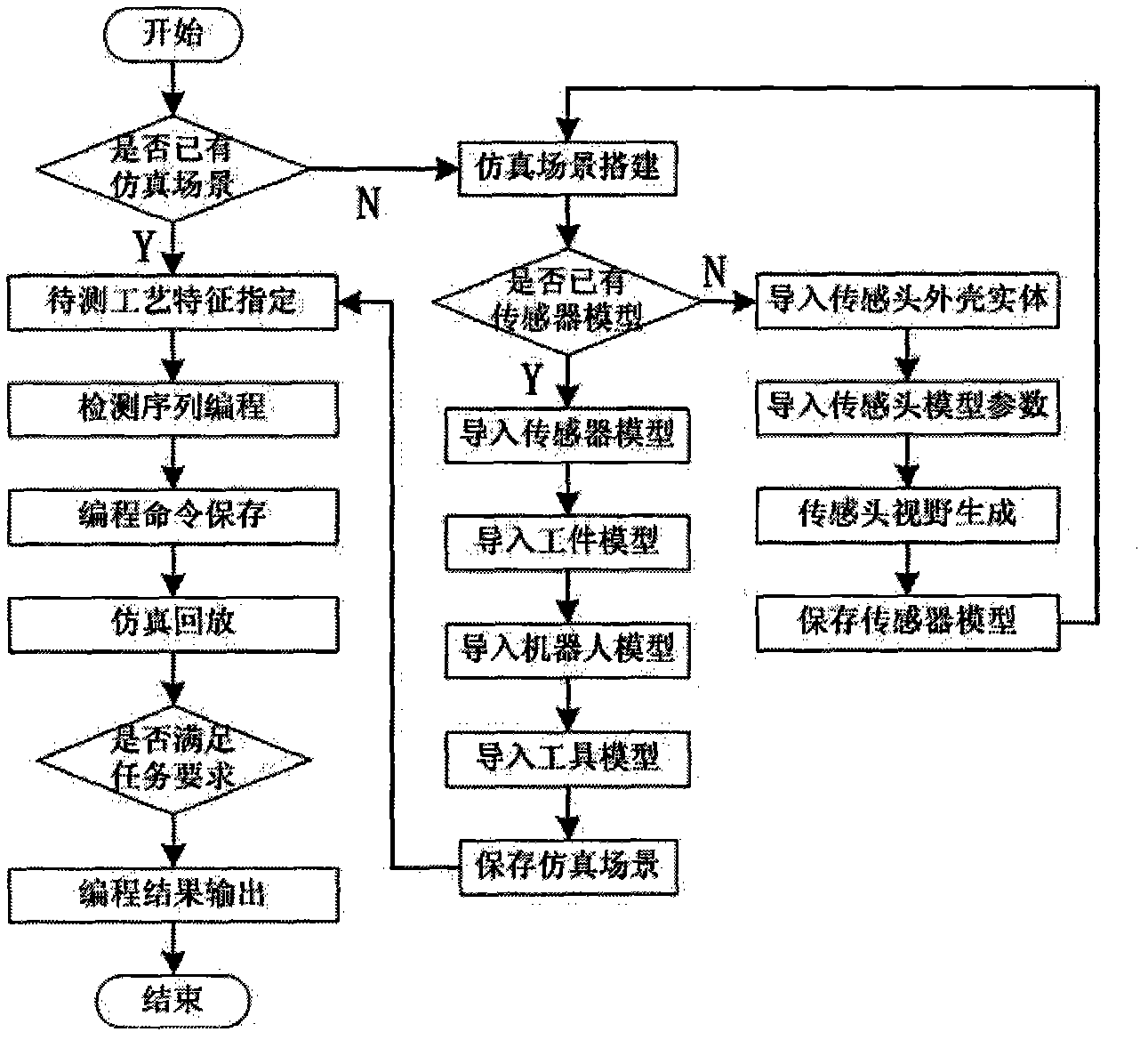
[0044] 1. Simulation scene construction
[0045] Open the scene file of the air simulation environment, import the sensor head model, the workpiece to be tested, the three-dimensional solid model of the robot and its tools, and complete the necessary assembly. Among them, the relative posture relationship between the camera coordinate system and the tool hand coordinate system, and the relative posture relationship between the workpiece to be measured and the robot base coordinate system should have been determined in the early des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More