

Cable-stayed bridge concrete cable tower surface detecting robot based on grabbing claws
A surface detection and robot technology, applied in the field of robotics, can solve the problems of difficult to reach the front part without cables, the wall does not form a force seal, and the structure is complex, so as to achieve simple motion principles and control methods, and overcome the influence of stability. , adapt to a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing, the present invention is described in detail:
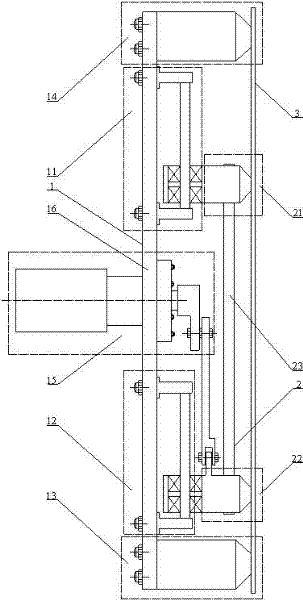
[0030] Such as figure 1 As shown, the robot for detecting the surface of the concrete pylon of the grab claw type cable-stayed bridge of the present invention includes a robot body mechanism 1 and a sliding mechanism 2; the body mechanism 1 is arranged on the body support plate 16 up and down The third grabbing claw module 13 and the fourth grabbing claw module 14 at both ends, as well as the first sliding support frame 11 and the second sliding support frame 12 arranged on the body support plate 16, and a set of driving devices 15 are composed The sliding mechanism 2 includes at least two grasping hook modules, which are respectively the first grabbing claw module 21, the second grabbing claw module 22, and the sliding connector 23.
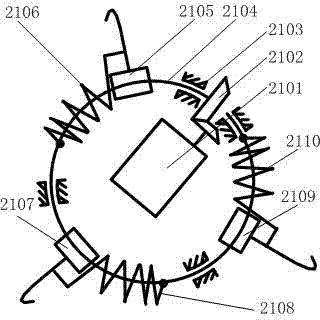
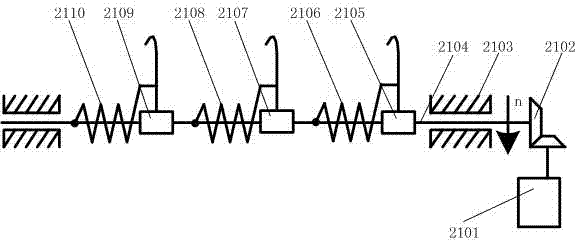
[0031] Such as figure 2 and image 3, the first grasping hook module 21 includes at least three tiny hooks, which are respectively the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More