

Hybrid-driven controllable excavation mechanism
A hybrid drive and frame technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problem of inability to complete flexible excavation actions and high requirements for hydraulic system components , Bucket teeth cannot produce cutting force, etc., to overcome the high requirements of hydraulic components, low processing and assembly requirements, and large digging force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
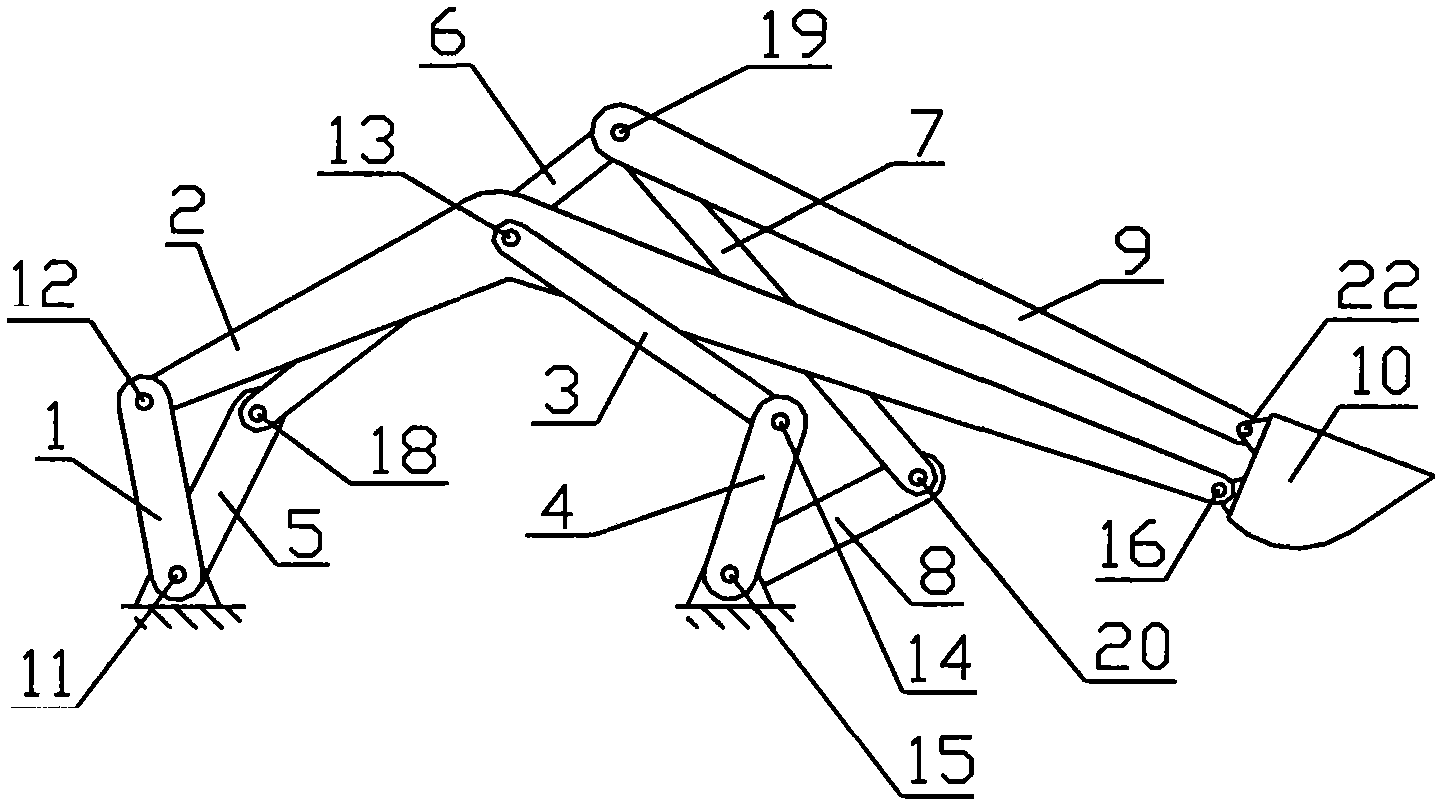
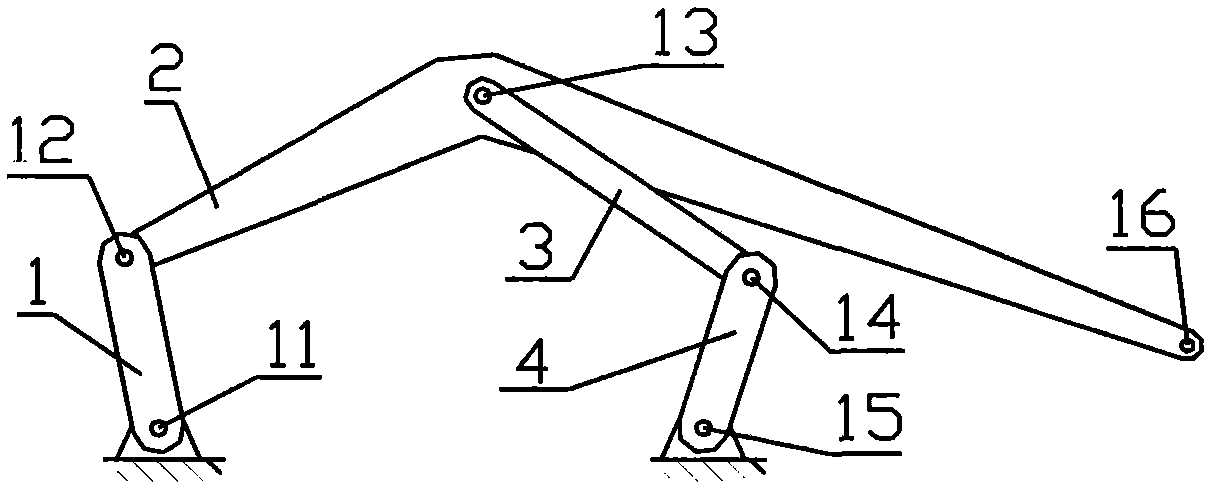
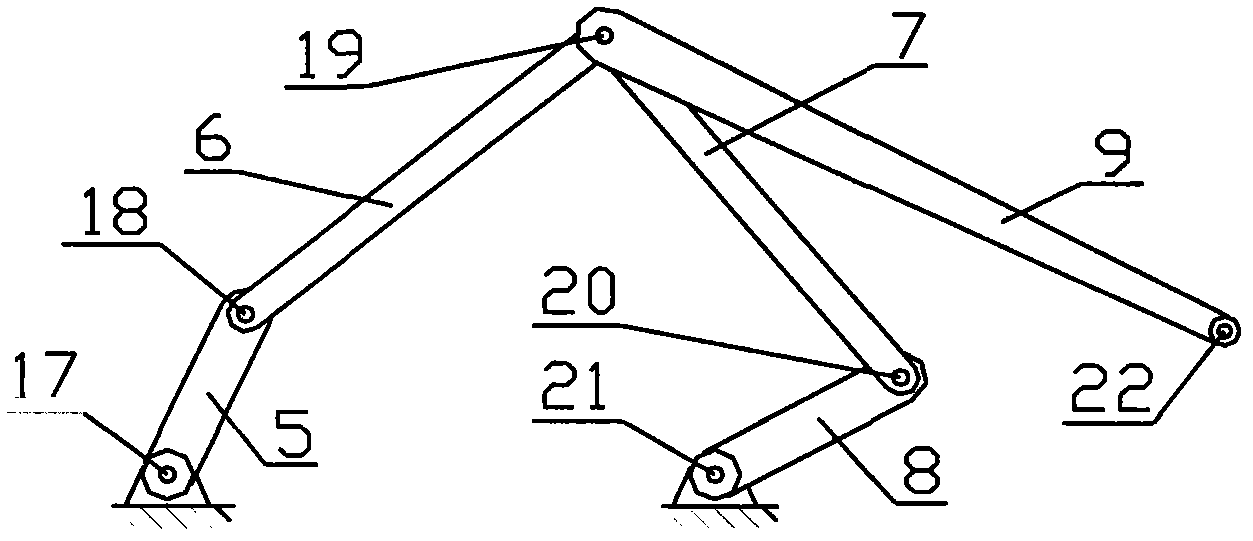
[0020] control figure 1 , 4 , a hybrid drive controllable excavating mechanism, including two sets of excavating arms, a positive shovel bucket and a frame.
[0021] control figure 1 , 2 and 4, the first excavating arm of the hybrid drive controllable excavating mechanism is a group of planar two-degree-of-freedom hybrid drive controllable mechanisms, consisting of the first active rod 1, the second active rod 4, the first connecting rod 2, the second The connecting rod 3 and the frame 27 are connected to form. One end of the first active rod 1 is hinged on the frame 27 through the first hinge hole 11, the other end is hinged with the first connecting rod 2 through the second hinge hole 12, and one end of the second active rod 4 is hinged on the third hinge of the frame 27. On the hole 15, the other end is hinged with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More