

Fisheye calibration method and device
A calibration method, fisheye technology, applied in image data processing, instrumentation, calculation, etc., can solve problems such as low operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
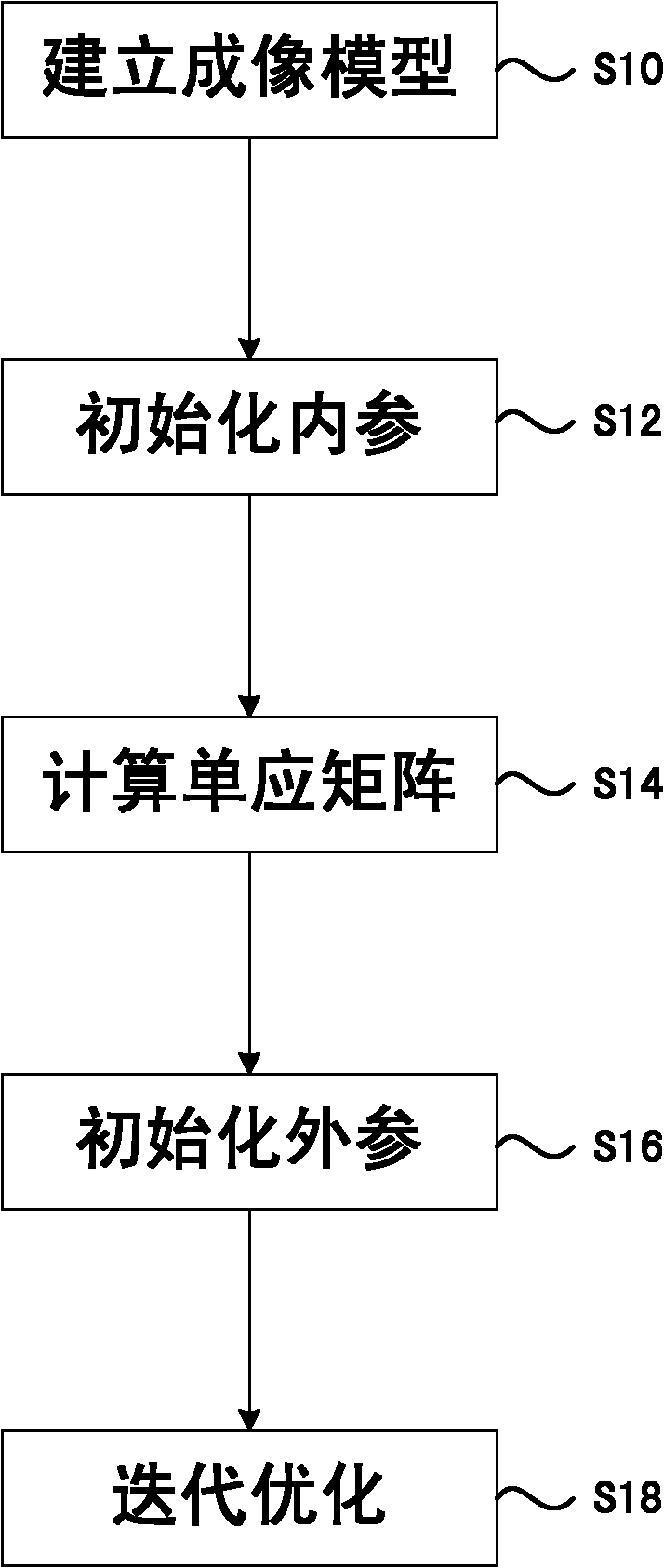
[0108] figure 1 The first embodiment of the fisheye calibration method of the present invention is shown.
[0109] Step S10: Establish a semi-unit spherical model, and establish a fisheye imaging relationship on the unit spherical model. The schematic diagram of the half unit sphere model is as follows Figure 4 As shown, record a point x in the space, its imaging point on the fisheye image is (u, v), and the incident angle of the incident light pointing to the center of the unit sphere is Where θ is the angle between the incident ray and the positive direction of the Z axis of the unit sphere, is the angle between the projection of the incident ray on the XY plane of the unit sphere and the positive direction of the X-axis of the unit sphere, then the angle of incidence of the incident ray The fisheye imaging model to the imaging point (u, v) on the fisheye image is described by the following equation:
[0110] r(θ)=k 1 θ+k 2 θ 2 +k 3 θ 3 +k 4 θ 4 +k 5 θ 5 +.....
no. 2 example
[0153] figure 1 The steps of the second embodiment of the fisheye calibration method are also shown, which are described in detail as follows.
[0154] Step S10: Establish a semi-unit spherical model, and establish a fisheye imaging relationship on the unit spherical model.
[0155] The schematic diagram of the half unit sphere model is as follows Figure 4 As shown, record a point x in the space, its imaging point on the fisheye image is (u, v), and the incident angle of the incident light pointing to the center of the unit sphere is Where θ is the angle between the incident ray and the positive direction of the Z axis of the unit sphere, is the angle between the projection of the incident ray on the XY plane of the unit sphere and the positive direction of the X-axis of the unit sphere, then the angle of incidence of the incident ray The fisheye imaging model to the imaging point (u, v) on the fisheye image is described by the following equation:
[0156] r(θ)=k 1 θ+...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More