

Robot suitable for omni-directionally moving on complex vertical face
A kind of omnidirectional mobile, robot technology, applied in the field of mobile robots, can solve the problem of unable to meet the work requirements, difficult to achieve flexible movement and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
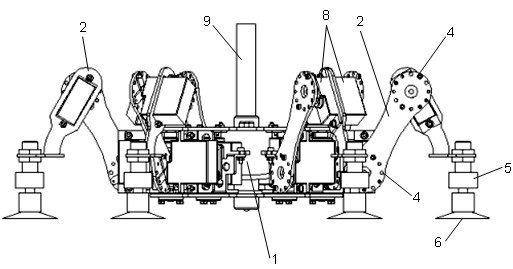
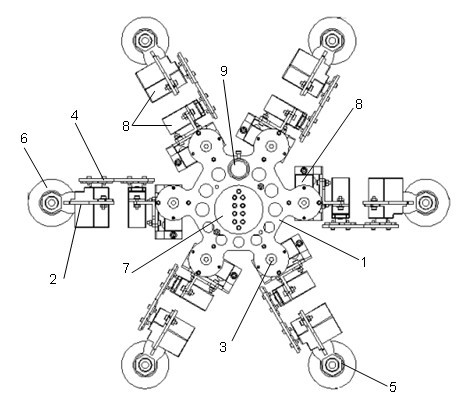
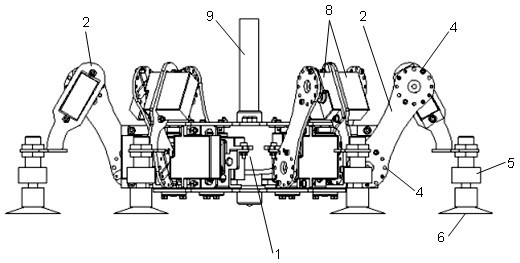
[0019] Such as Figure 1-Figure 2 As shown, the robot of the present invention that is suitable for omnidirectional movement on complex facades includes:
[0020] The body 1 has a regular hexagonal structure;
[0021] Climbing feet 2, six in total, are arranged on the six vertices of the body 1 respectively. Each climbing foot 2 is designed as two sections, and the sections are connected by rotating hinges 3, and the sections and the body 1 are connected by rotating hinges 3 and The swing hinge 4 is connected in a combined connection mode, and the bottom of each climbing foot 2 is also connected with a negative pressure suction cup 6 through a ball chain 5;
[0022] The sucker drive mechanism includes a connected vacuum pump (not shown in the figure) and a solenoid valve 7, and the vacuum pump is also connected to the negative pressure sucker 6 respectively; the series-parallel structure of six climbing legs 2 is realized through the solenoid valve 7, that is, each leg 2 is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More