

Strap-down inertial navigation transfer alignment algorithm parallel implementation method
A technology for strapdown inertial navigation and transfer alignment, applied in the field of strapdown inertial navigation, can solve the problem that the calculation speed of the alignment algorithm is difficult to effectively improve, and achieve the effect of improving the parallelism of the algorithm and increasing the calculation speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The formula symbols are explained as follows:
[0025] h Altitude where the carrier is located
[0026] l The latitude of the carrier
[0027] g 0 The acceleration of gravity at sea level at the equator
[0028] T Calculation cycle
[0029] Q k System Noise Matrix
[0030] R k Measurement noise matrix
[0031] f a / q () A function that converts the attitude angle into the corresponding attitude quaternion
[0032] In the following, the parallel implementation method of the present invention will be described in detail by taking the commonly used speed plus attitude matching algorithm in the transfer alignment of the moving base as an example.
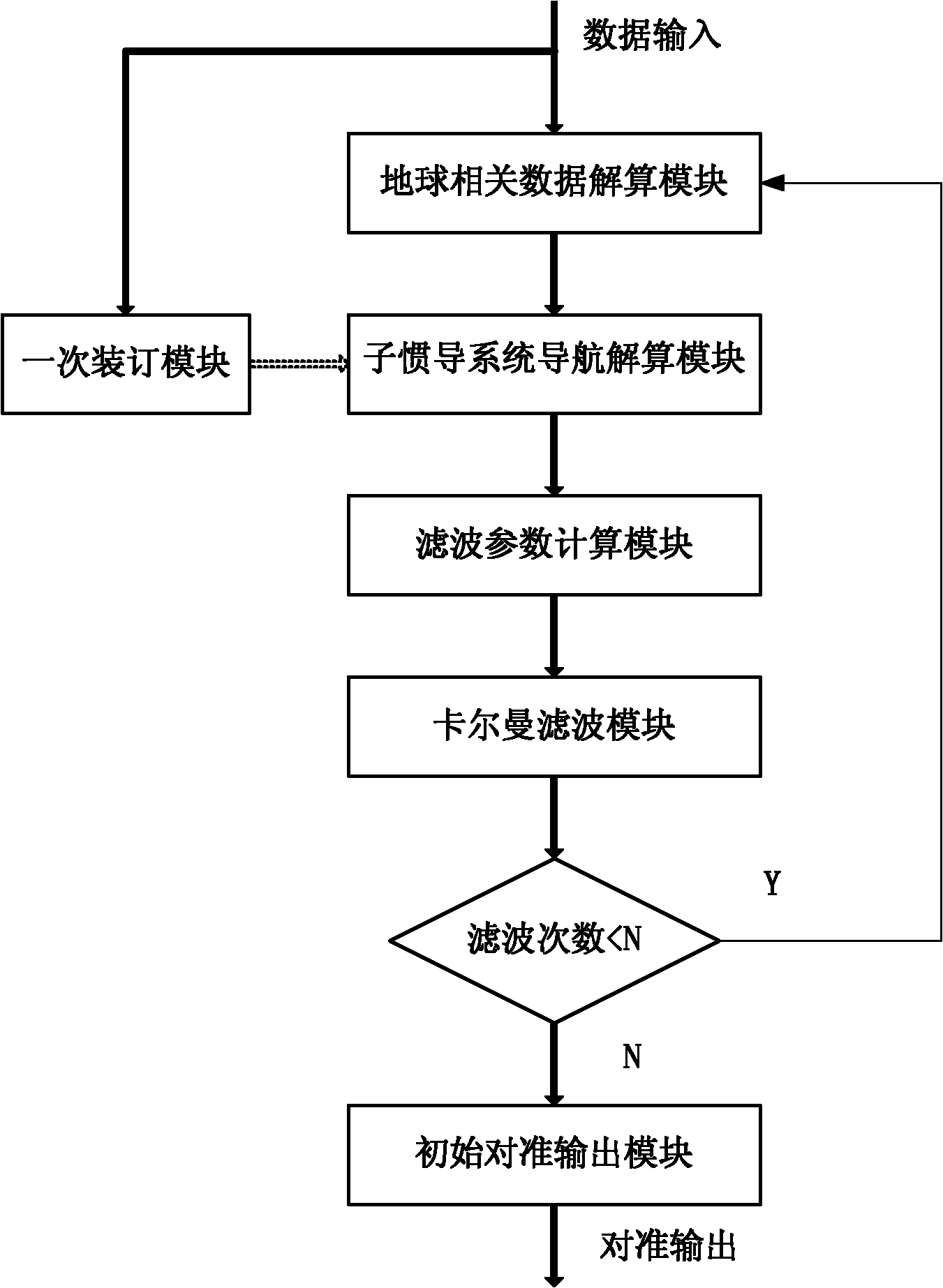
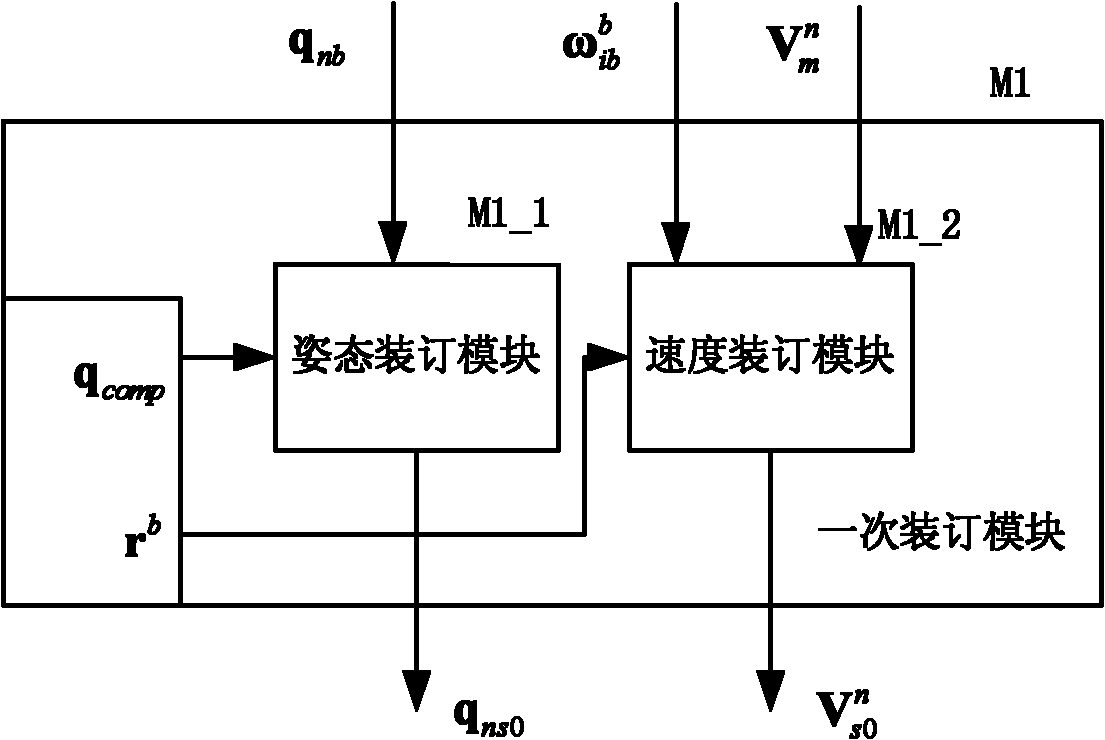
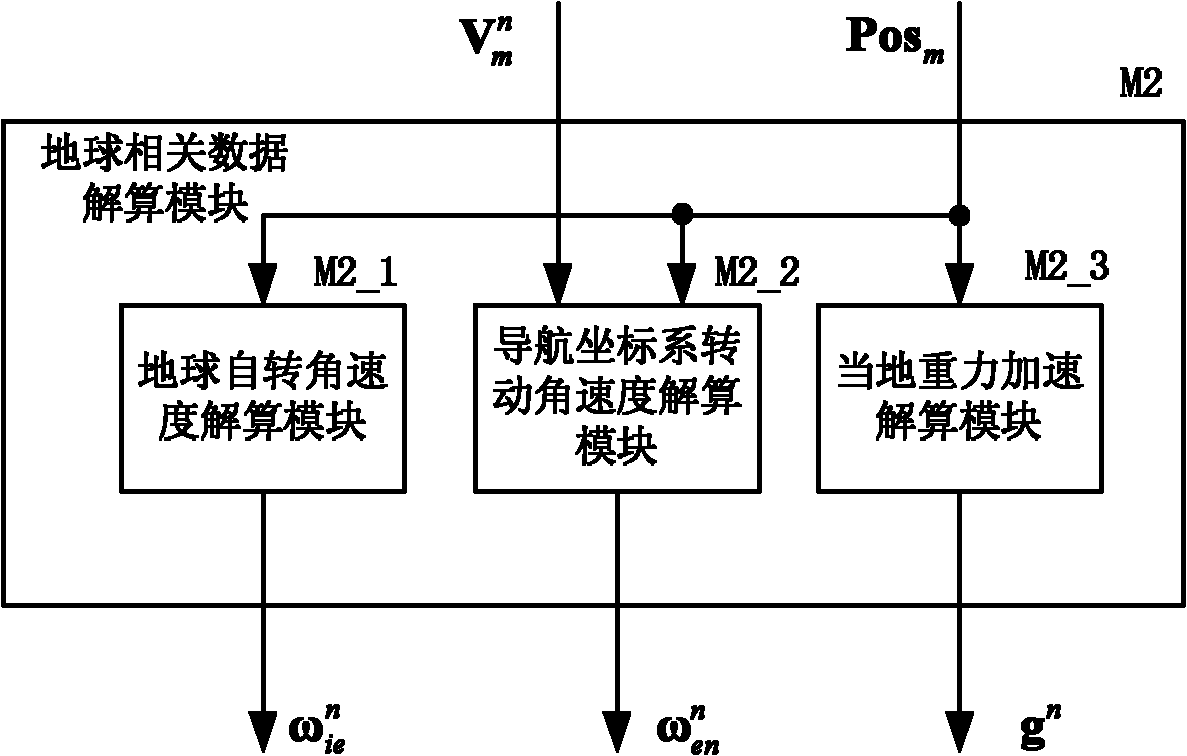
[0033] The flow chart of the transfer alignment algorithm of the present invention is as follows figure 1 As shown, it includes: a binding module, an earth-related parameter calculation module, a sub-inertial navigation system navigation calculation module, a filter parameter calculation module, a Kalman filte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More