

Error correction method of autonomous navigation system
An autonomous navigation system and error correction technology, applied in the direction of measuring devices, instruments, etc., to achieve the effect of improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
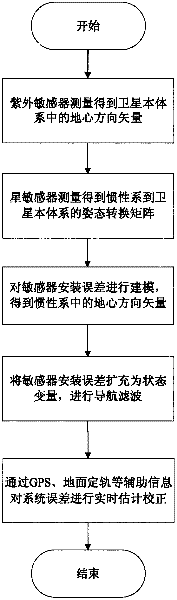
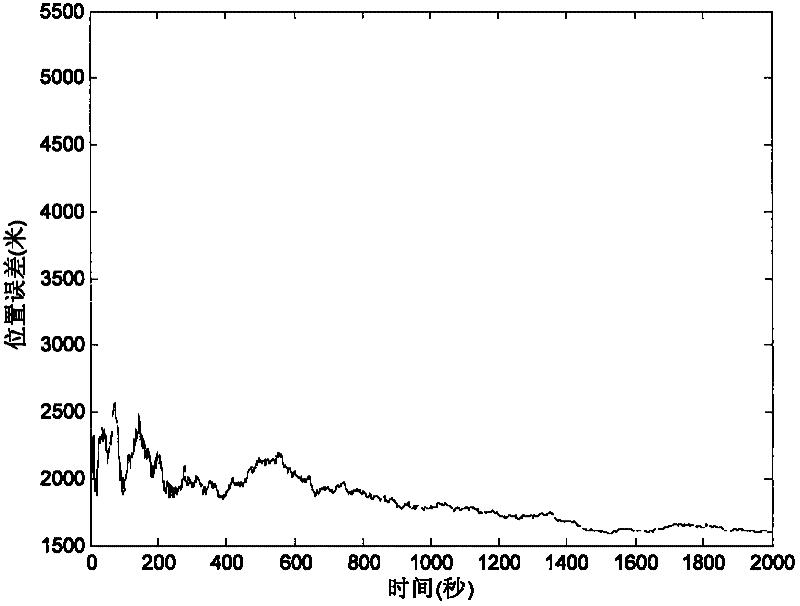
[0035] In order to show the advantages of this method more clearly, a mathematical simulation is carried out here. The simulation conditions are: the satellite altitude is 500 kilometers, the inclination angle is 97.4 degrees, and the measurement error of the earth center direction is 0.02 degrees. It is assumed that the installation error angles of the ultraviolet sensor along the three coordinate axes are respectively 50", 40", 30".
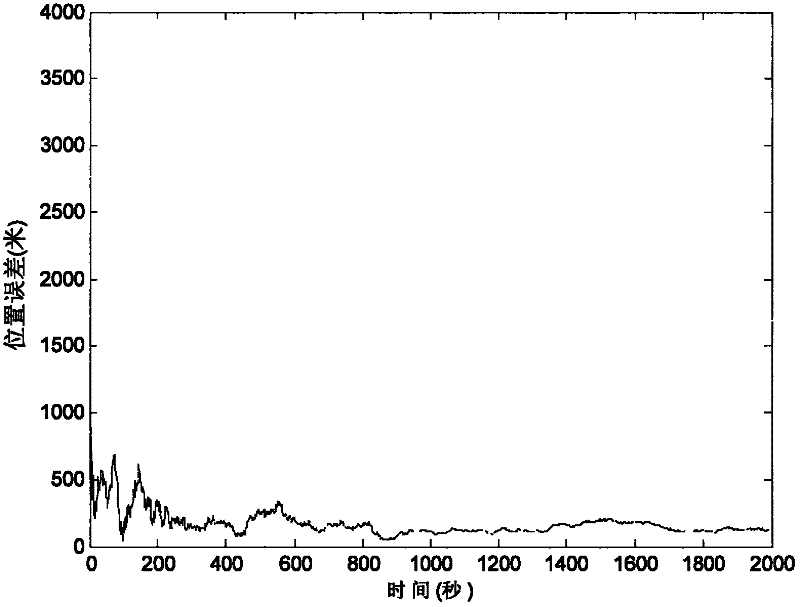
[0036] figure 1 is the simulation result without correcting the installation error, figure 2 It is a diagram of the simulation result after the installation error is corrected by the method of the present invention. It can be seen from the figure that the position accuracy is 1620.059 meters when the system error is not corrected, and the position accuracy is 125.525 meters after the system error is corrected. Therefore, after using the method of the present invention to estimate and correct the installation error angle, the navigation accura...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More