

Robot foot mechanism with flexible joint
A technology of flexible joints and robots, which is applied in the field of robots, can solve problems such as inability to effectively reduce vibrations, and achieve the effects of smooth and natural gait, stable landing, and convenient manufacturing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with accompanying drawing.
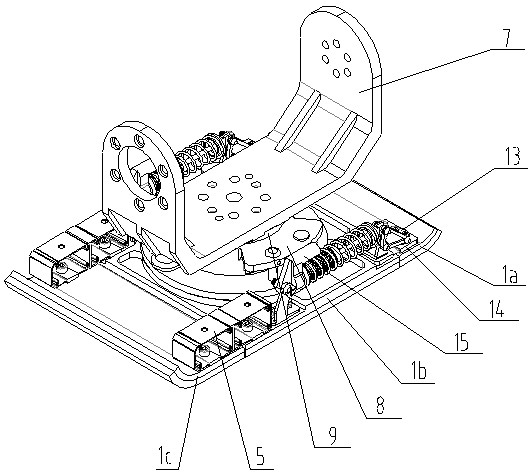
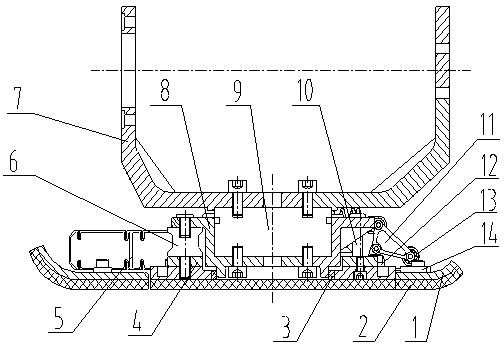
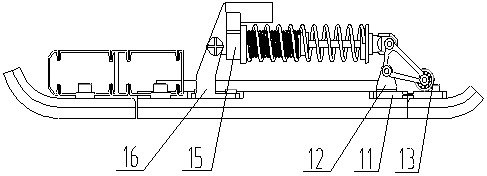
[0025] Such as figure 1 Shown, the present invention comprises the toe plate 1c that the front edge bends upwards, the heel plate 1a that rear edge bends upwards, the sole plate 1b that is arranged between the toe plate 1c and the heel plate 1a, flexible hinge 5, spring plate 14, heel reducer Shock device (13 bearings, 14 spring plates, 15 damping shock absorbers), six-dimensional force sensing device (8 six-dimensional force moment seat, 9 six-dimensional force moment sensor) and ankle support seat 7.
[0026] The toe plate 1c is connected to the sole plate 1b through a flexible hinge 5, and the sole plate 1b is connected to the heel plate 1a through a spring plate 14;
[0027] The six-dimensional force-moment device is placed on the sole plate 1b, and the sole plate 1b on both sides of the six-dimensional force-moment sensing device is equipped with a heel damping device...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More