

Joint arm robot with U shaped base
A kind of articulated arm and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to use, and achieve the effect of high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
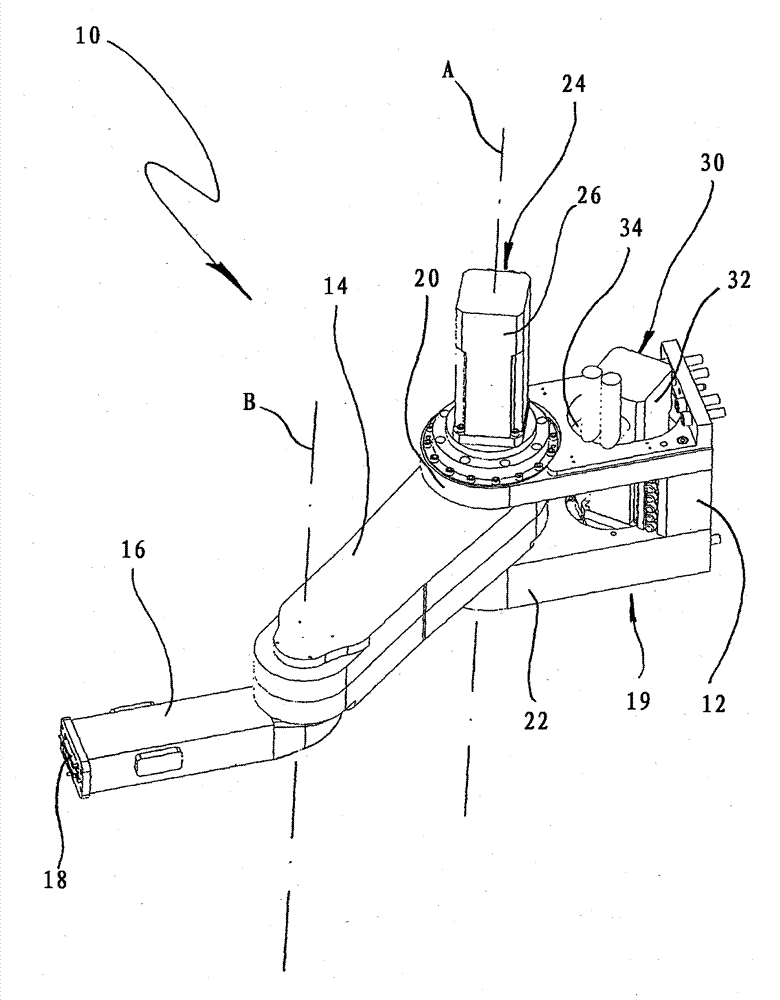
[0020] exist figure 1 A perspective view of an articulated arm robot, generally indicated at 10, is shown in , having a base 12, a first robot arm 14 rotatably arranged on the base about a first axis of rotation A, and A second robot arm 16 is arranged rotatably about a second axis of rotation B on a robot arm 14 . On the free front end of the second robot arm 16 there is an interface 18 for the modular mounting of a tool not shown here, which can be, for example, a gripper or a suction head, and which can be swiveled about a third axis of rotation And / or move along the lifting axis.
[0021] In the illustrated exemplary embodiment, the first axis of rotation A and the second axis of rotation B extend parallel to one another. Due to the similarity to a human arm, the first robot arm 14 is also called the upper arm and the second robot arm 16 is called the lower arm.
[0022] The base 12 by which the articulated arm robot 10 is fixed, for example on a wall or on a support fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More